



















Chapter 7 Usage of Various Functions
7-87
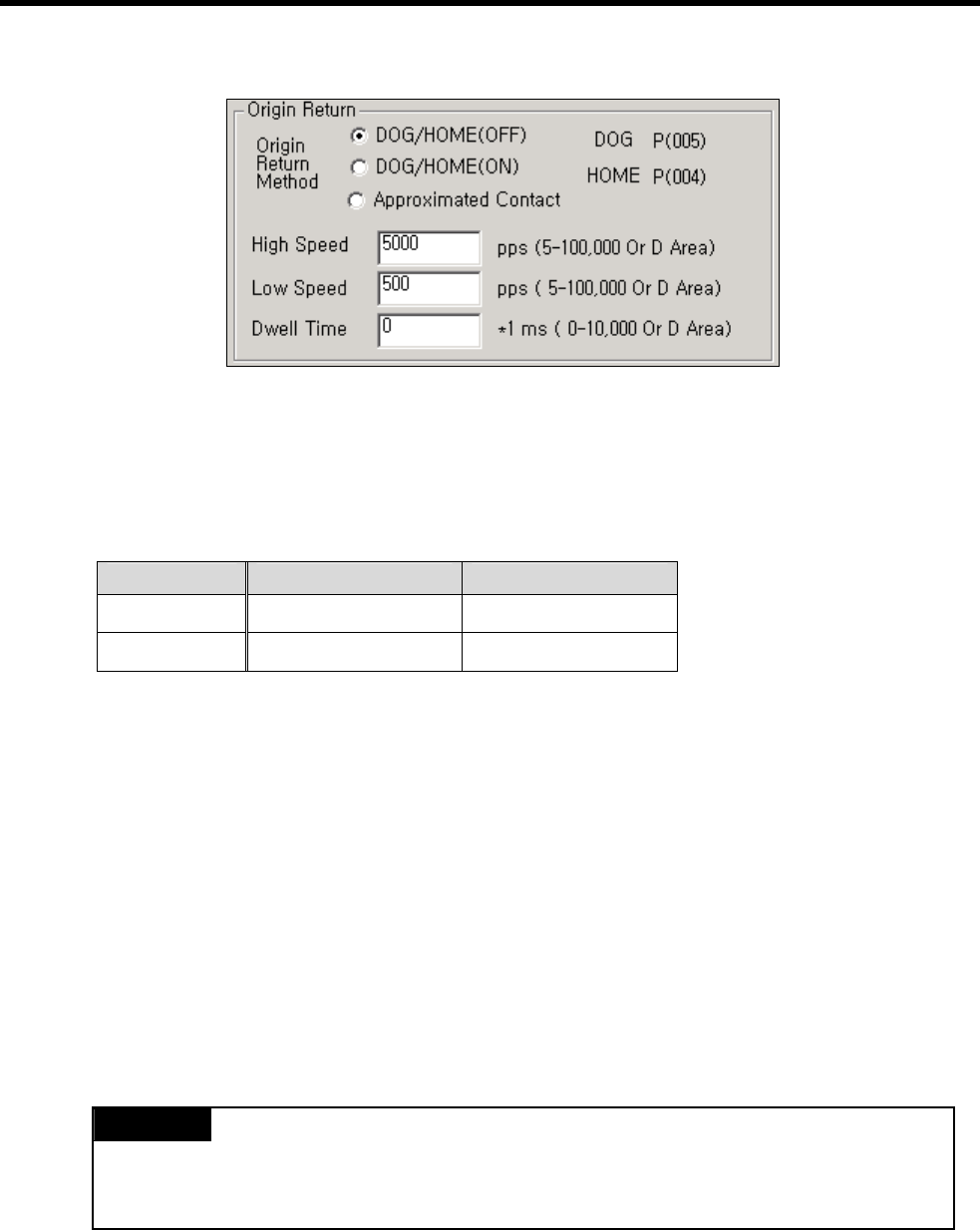
(2) Origin return parameter
(A) Origin return method
• For the details, please refer to ‘7) Return to Origin’ in chapter 7.3.2
(B) DOG, origin signal
Ch 0 Ch 1
DOG P0005 P0007
Origin P0004 P0006
(C) Origin return speed
• The speed when returning to the origin by origin return command : high speed and low speed
• When setting the origin return speed, it should be “speed limit ≥ origin return high speed ≥ origin return low
speed ≥ bias speed”.
① Origin return high speed
• The speed that acts to the constant speed section via acceleration section by origin return command.
• Origin return-high speed setting range : 5 ∼ 100,000(unit: 1pps)
② O
rigin return-Low speed
• The speed that acts to the constant speed section via deceleration section by origin return command.
• Origin return-low speed setting range : 5 ∼ 100,000(unit: 1pps)
Remark
When setting the origin return speed, it is recommended to set the origin return-low speed as low speed as
possible. If setting the low speed as “too fast”, it may cause the incorrect origin signal detection.
(D)
Dwell Time
• This is the time needed to maintain the precise stop accuracy of SERVO motor when using the SERVO motor for
positioning.
• Practically, Dwell time is the time needed to remove the residual pulse of deviation counter after completion of
positioning and especially Dwell time when returning to the origin is called as “origin return dwell time”.
• Setting range of Origin return dwell time : 0 ∼ 10,000(unit: 1 ㎳)