



















4. MENU OPERATION
4-6
Set rudder gain so that the boat does not make frequent yaw. The figure shown below
provides general guidelines for setting rudder gain.
Boat's Speed
Sea State
Load Condition
RUDDER GAIN
fast
calm
light
low
slow
rough
heavy
high
General guidelines for setting rudder gain
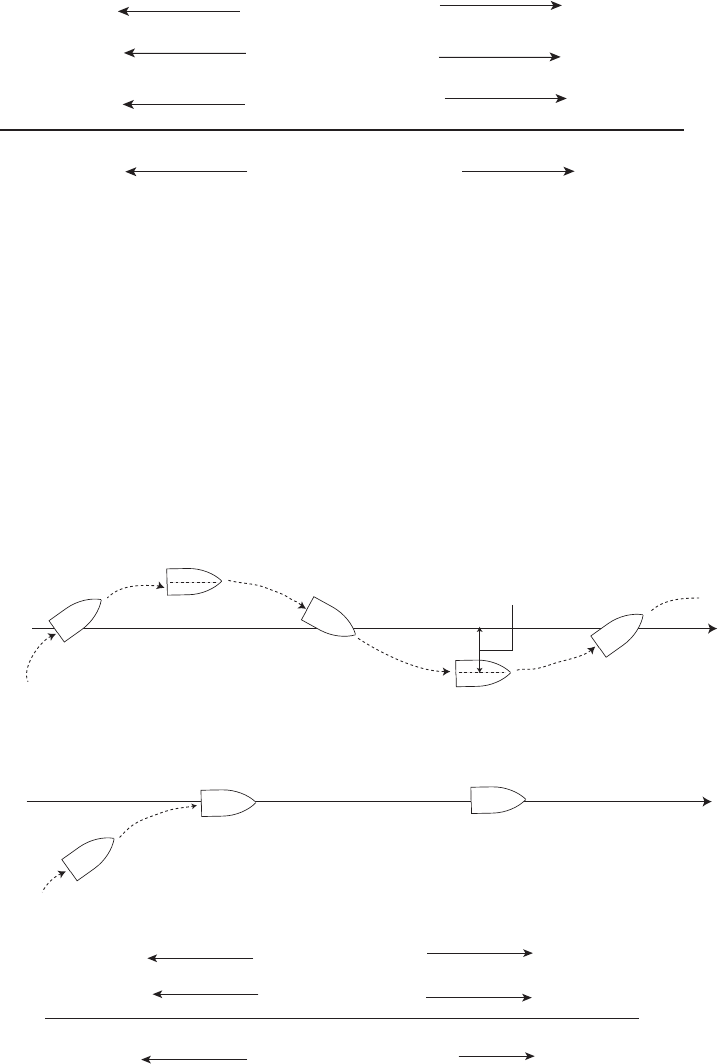
COUNTER RUDDER
If the boat is heavily loaded, the heading could change excessively because of inertia. This
phenomenon causes the vessel to “overshoot” the intended course. If this happens, the
NAVpilot-511/520 will steer the rudder to the opposite side and the heading will turn in
opposite direction excessively again. In an extreme case the heading oscillates several
times until it finally settles in the new course. An adjustment known as “counter rudder”
prevents this kind of oscillation.
Counter rudder is usually not required for small boats. When your boat zigzags a lot before
settling in the new course, increase the counter rudder setting.
Intended
course
Large course error
The counter rudder feature functions to smoothly
return ship's heading toward intended course.
Counter rudder:
small setting
Counter rudder:
proper setting
Boat's Speed
Load Condition
COUNTER RUDDER
slow
light
low
fast
heavy
high
General guidelines for setting counter rudder gain