



















Chapter 7 Usage of Various Functions
7-69
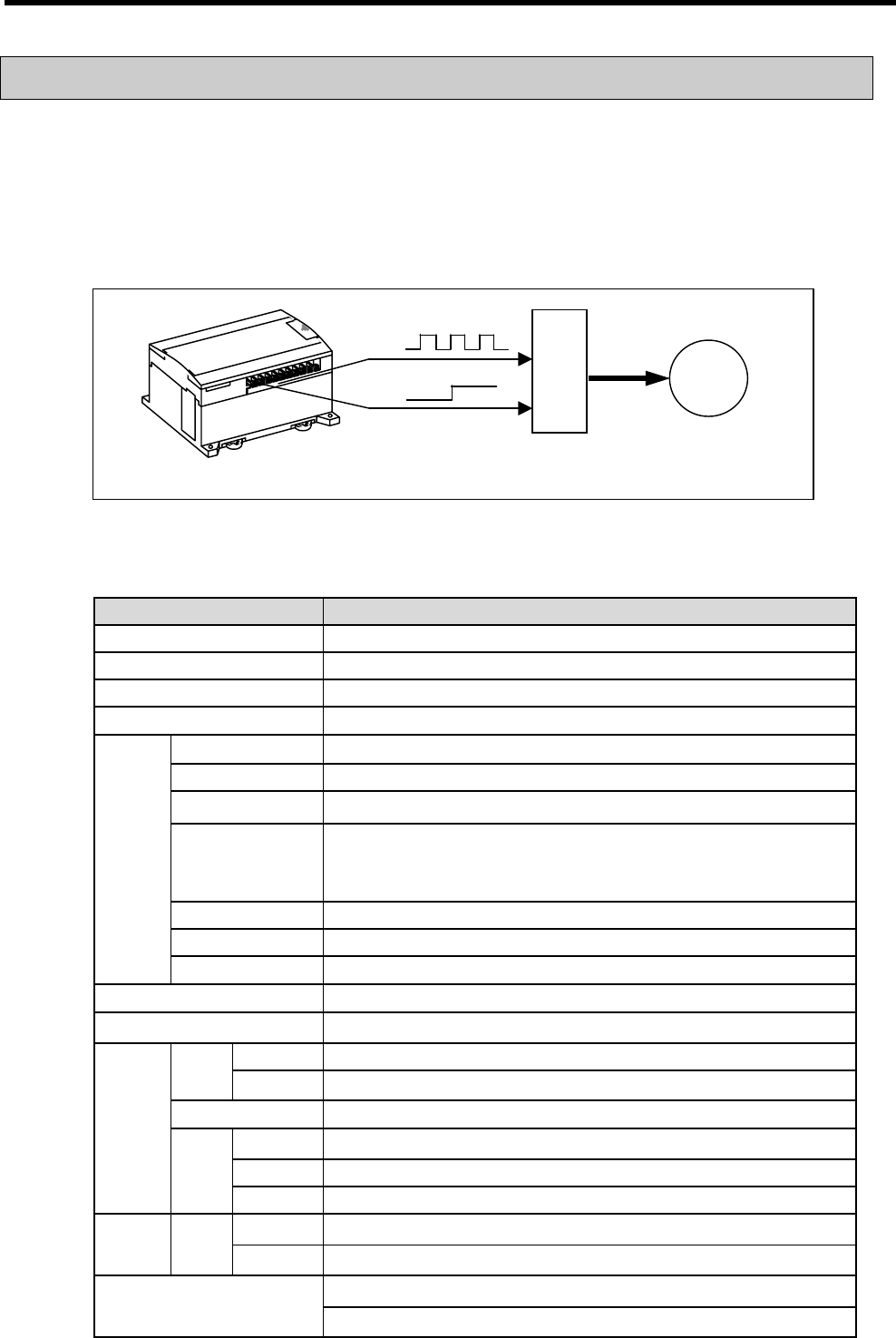
7.3 Positioning Function(DRT/DT type only)
The DRT/DT type of MASTER-K120S series support 2 axes of positioning function. The purpose of positioning function is to
transfer the moving objects by setting speed from the current position and stop them on the setting position correctly. And it also
control the position of high precision by positioning pulse string signal as it is connected to various servo running devices or
stepping motor control running devices.
7.3.1 Specification
1) Performance Specification
Items Specification
No. of control axis 2 axes
Control method PTP(Point-To-Point), speed control
Control unit Pulse
Positioning data
20 data per each axis( Operation step No. : 1 ∼ 20)
Positioning method Absolute / Incremental method
Address range
-2,147,483,648 ∼ 2,147,483,647
Speed
Max. 100kpps , Speed setting range : 5 ∼ 100,000pps(unit of pulse)
Acceleration/
Deceleration method
Operation pattern : Trapezoidal method
Acceleration time : 0 ∼10,000 ㎳(unit of 1ms)
Deceleration time : 0 ∼10,000 ㎳(unit of 1ms)
Backlash compensation 0 ~ 1,000 Pulse
Bias speed
5 ∼ 100,000pps
Positioning
Speed limit
5 ∼ 100,000pps
Operation mode End, Keep, Continuous operation
Operation method Single, Repeated operation
High speed
Speed setting range: 5 ∼ 100,000pps
Speed
Low speed
Speed setting range: 5 ∼ 100,000pps
Dwell time
Setting range : 0∼10,000 ㎳
1 Origin detection when approximate origin turns off
2 Origin detection after deceleration when approximate origin turns on.
Return to
origin
Method
3 Origin detection by approximate origin
High speed
Speed setting range: 5 ∼ 100,000pps
JOG Speed
Low speed
Speed setting range: 5 ∼ 100,000pps
Period setting range: 1 ∼ 20,000 ㎳
PWM Output
Duty setting range: 0 ∼ 100%
Driver
K7M-DRT/DTxxU
Motor
Pulse
Direction
M