

















Chapter 7 Usage of Various Functions
7-106
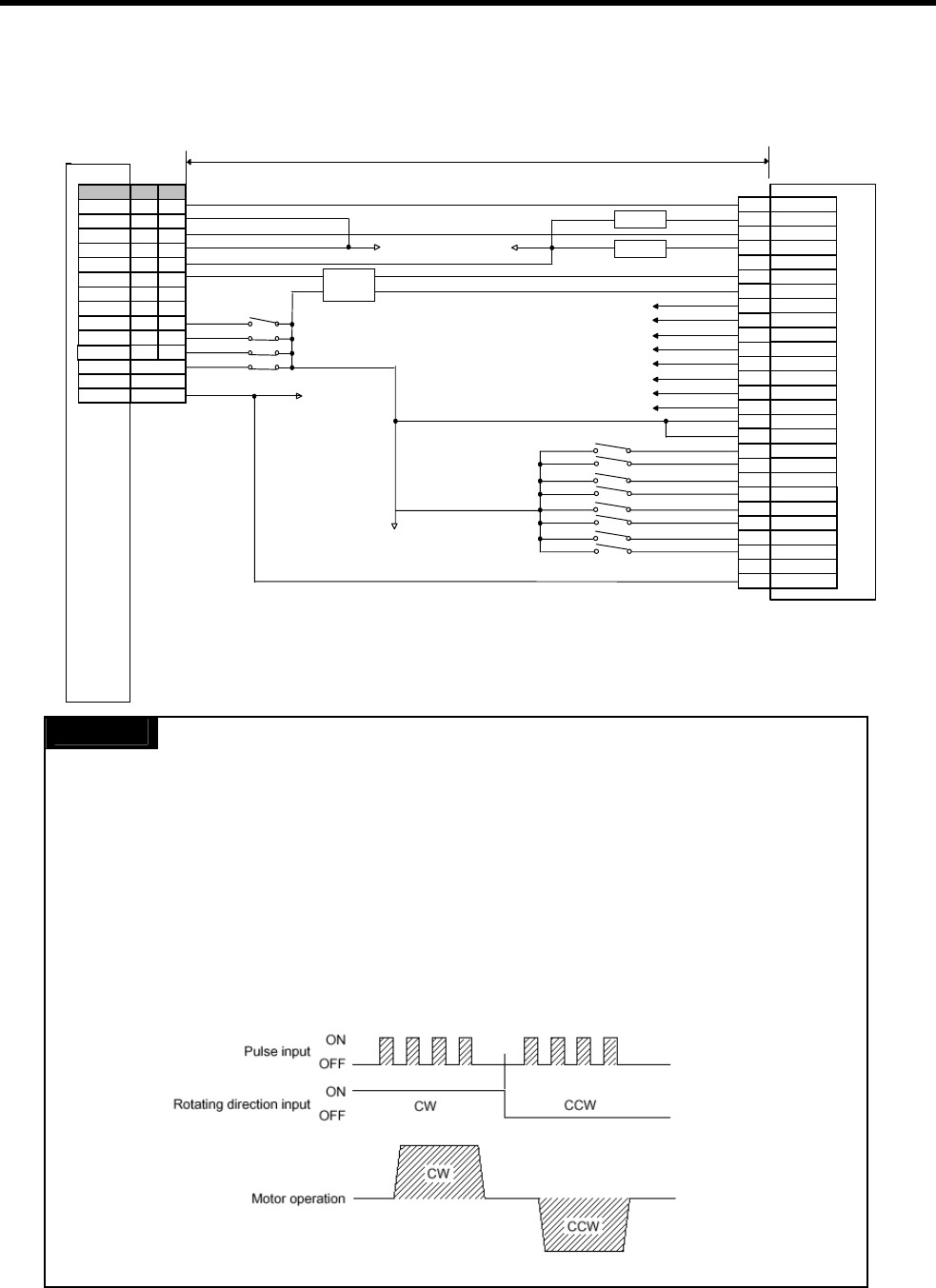
4) Wiring with Servo motor driver(FDA-5000 AC Servo Driver)
Remark
1) The rated input for the origin of K120S is DC 24V. Linedriver output, wire a DC SSR and return to origin by DOG
signal or using a origin sensor of original signal.
2) Input points for origin, approximate origin point, and upper/lower limit signal are fixed but, if they’re not used you
able to use them general input point. You can use emergency stop with the command(POSCTR)
3) Using DC 24V, wire a proper resistor(1.5K, 1/2W) to driver in series.
4) Positioning phase of K120S is as follow: Set the input mode of a step mode driver to 1 phase input mode
because motor operation mode is determined by rotating direction input.
PFIN
PPFIN
PRIN
PPRIN
PZO+
PZO-
RDY
INPOS
10
11
12
9
5
30
21
22
0 SPEED
BRAKE
ALARM
A_CODE0
A_CODE1
47
48
20
45
19
A_CODE2
44
GND24
GND24
CCWLIM
24
25
SVONEN
CLR
18
38
15
P24V
24G
Max 2m
FD
A
-5000
P24V24G
CWLIM
40
ESTOP
39
ALMRST
P/P1
38
41
TLIM 14
+24VIN
49
1.5K,1/2W
1.5K,1/2W
Pulse
K7M-DRT**U
P40 P41
Signal name Ch0 Ch1
Direction P42 P43
Common COM0 COM1
Common COM2 COM2
Input +24V P P
Origin
P04
P06
High Limit
Low Limit
Emergency Stop
Common
DOG
* 2
P05 P07
P01 P03
P00
P02
Input point
COM0(Input)
SSR
*1
* 3
* 4