











Technical Appendix
99
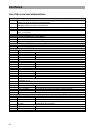
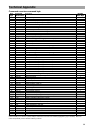
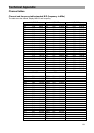
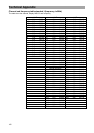
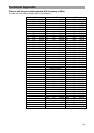
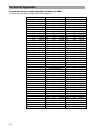
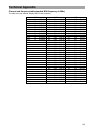
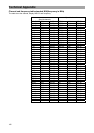
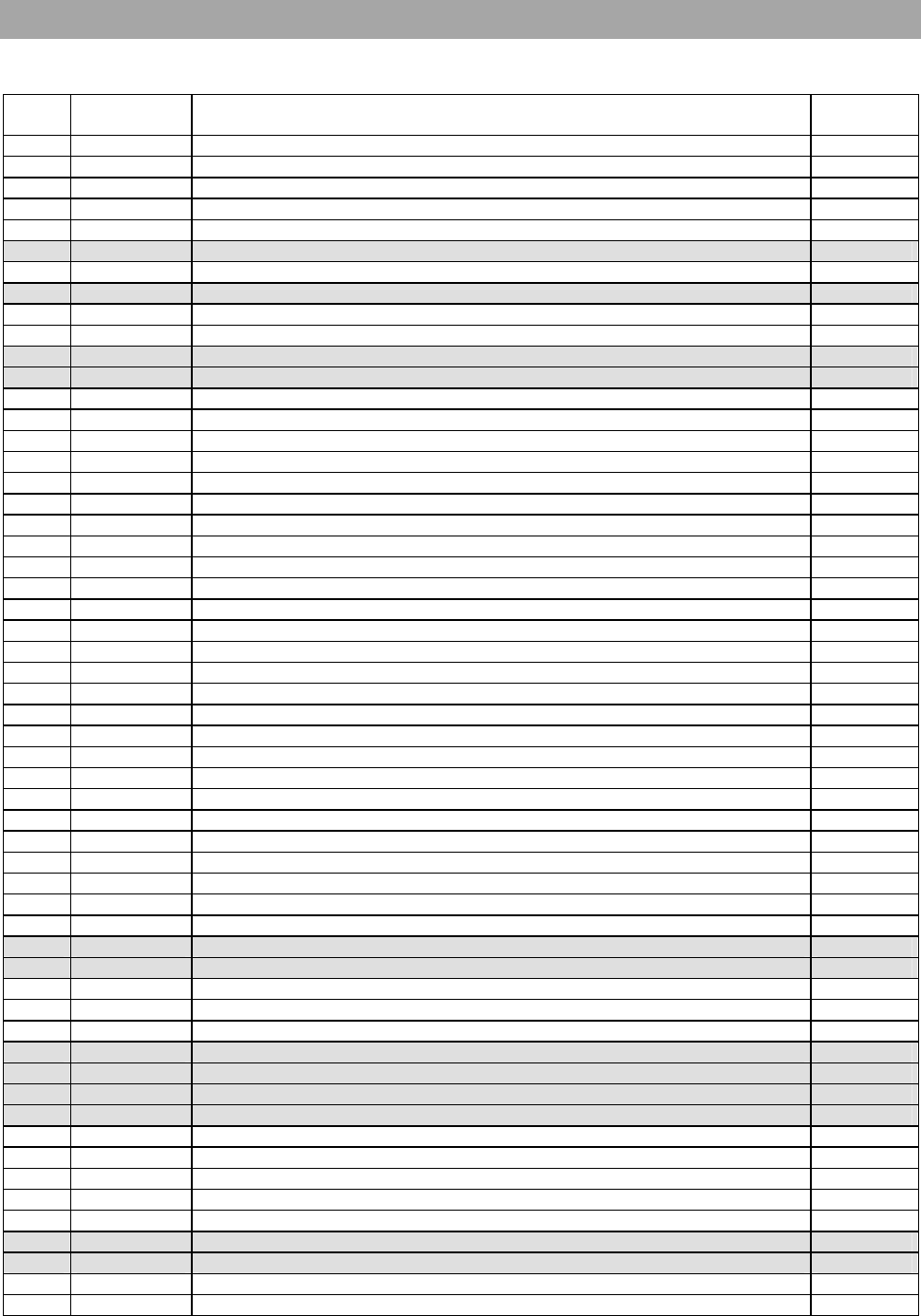
Command overview command byte
Hex-
byte
Command
identification
Description
Number
Data/ Byte
00 Reset Reset DiSEqC minicontroller
-
01 Clr. Reset Reset flag clear -
02 Standby Switches off the peripheric power supply unit -
03 Power on Switches on the peripheric power supply unit -
04 Set Contend Sets the contention flag -
05 Contend Feedback only when contention flag is set -
06 Clr. Contend Clears contention flag -
07 Adresse Feedback only when contention flag is not set -
08 Move C Which address when contention flag is set 1
09 Move Which address when contention flag is not set 1
10 Status Reads status-register flags -
11 Config. Reads configuration flags -
14 Switch 0 Reads switching status flags (committed port)
-
15 Switch 1 Reads switching state flags (uncommitted port) -
16 Switch 2 Expansion option -
17 Switch 3 Expansion option -
20 Set LO Calls up the low local oscillator frequency -
21 SET VR Calls up the vertical polarisation or circular polarisation , clockwise -
22 Set Pos A Selects satellite position A -
23 Set S0A Selects switch option A -
24 Set Hi Calls up the high local oscillator frequency -
25 Set HL Calls up the horizontal polarisation or circular polarisation, counter-clockwise -
26 Set Pos B Selects satellite position B -
27 Set S0B Selects switch option B -
28 Set S1A Calls up matrix S1 input A (input B inactive) -
29 Set S2A Calls up matrix S2 input A (input B inactive) -
2 A Set S3A Calls up matrix S3 input A (input B inactive) -
2 B Set S4A Calls up matrix S4 input A (input B inactive) -
2C Set S1B Calls up matrix S1 input B (input A inactive) -
2D Set S2B Calls up matrix S2 input B (input A inactive) -
2E Set 3SB Calls up matrix S3 input B (input A inactive) -
2F Set S4B Calls up matrix S4 input B (input A inactive) -
30 Sleep All bus-commands are ignored except „Awake“ -
31 Awake Bus-commands are accepted again -
38 Write N0 Sets port group 0 1
39 Write N1 Sets port group 1 1
3A Write N2 Expansion option
3B Write N3 Expansion option 1
40 Read A0 Reads analogue value A0 -
41 Read A1 Reads analogue value A1 -
48 Write A0 Sets analogue value A0 1
49 Write A1 Sets analogue value A1 1
4F Write A7 Sets analogue value A7 1
50 LO string Reads current frequency -
51 LO now Reads current frequency (Table entry number) -
52 LO Lo Reads low frequency table entry number -
53 Lo Hi Reads hi frequency table entry number -
58 Write Freq Writes channel frequency 2 or 3
59 Ch.No. Sets the selected channel number (Receiver) 2
60 Halt Stops positioner -
61 Go E Directs positioner to the east -
Go W Directs the positioner to the west 62
64 P Status Reads positioner status register -
65 Read Pos Reads positioner counter -
6C Goto Drives positioner motor to counter value hi, low 2
6D Write Pos Set positioner counter hi, low 2
In the MSK 33, two different DiSEqC types have integrated. DiSEqC 1.0: With this system, DiSEqC commands can be sent but not
received. DiSEqC 2.0: With this system, DiSEqC commands can be sent and received (highlighted in grey in the table). Bold com-
mands are preferably used for Kathrein switching matrices.