



















4
525 Programmable Motion Controller
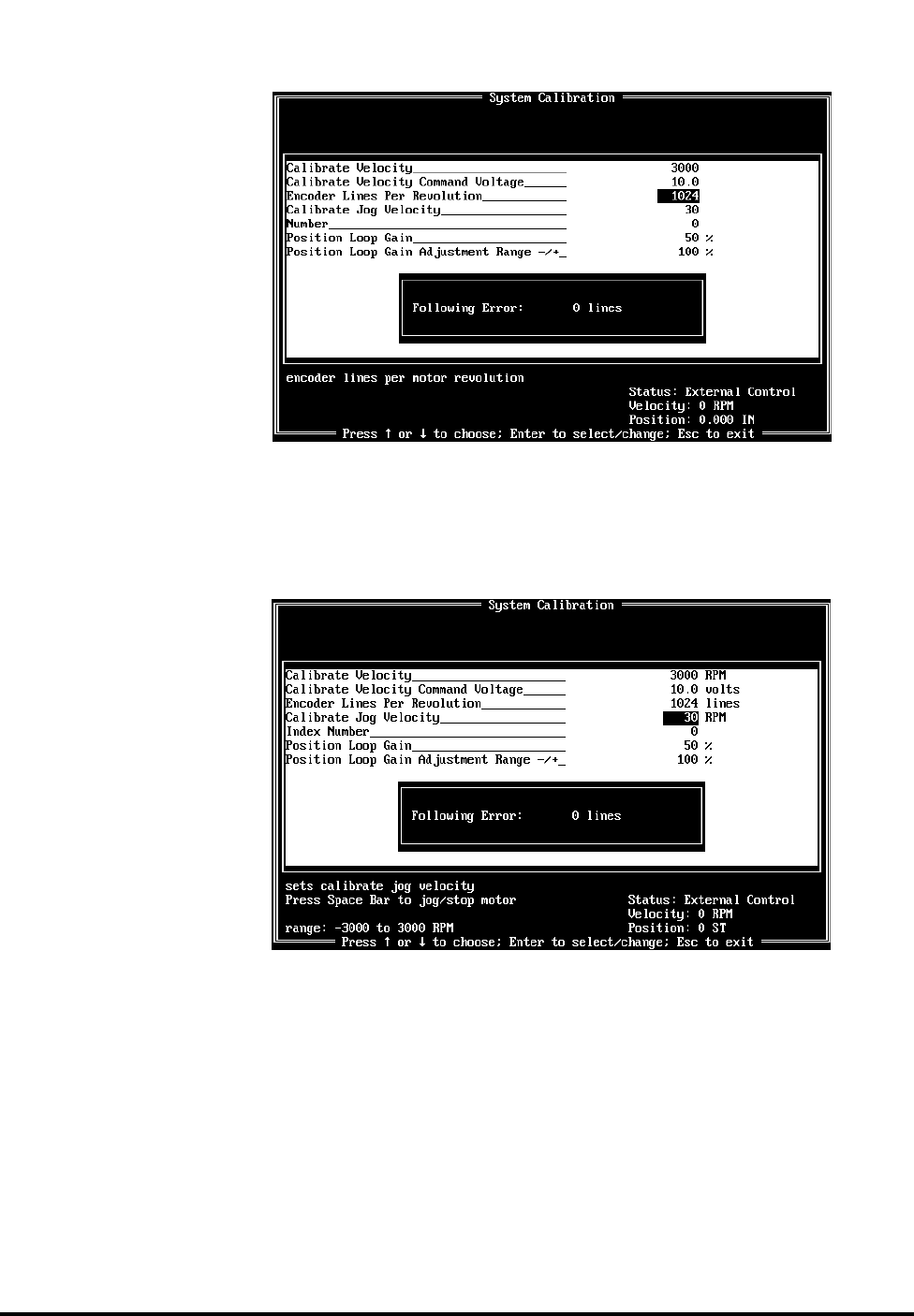
Figure 5 System Calibration (Encoder Lines)
This default value is fixed at 1024 lines per revolution and may be altered. Enter a
carriage return and the cursor will now be positioned on the Calibrate Jog Velocity
selection.
Figure 6 System Calibration (Jog Velocity)
In this position the user can jog the motor at any velocity while being able to
monitor the following error scaled in encoder lines of error. It is also at this point
that the offset of the external drive can be adjusted. By leaving the motor at rest,
monitor the following error while adjusting the offset adjustment of the external
drive. Adjust this offset to minimize the following error,preferably as close to 0 as
possible. After completion of the offset adjustment, a running adjustment to "fine
tune" the system is performed.
NOTE: The motor shaft must be free to rotate indefinitely during this
test or else machine damage may occur. The space bar is used
to start and stop motion. If unable to allow indefinite rotation,
care must be taken to prevent reaching travel limits.