



















5
Fault Polarity and Calibration
Enter a "Calibrate Jog Velocity" of a very low value (e.g., 30 RPM) and enter a
carriage return. Ensure that the shaft of the motor is free to rotate and depress the
space bar to begin motion. Observe the "Following Error". If the following error is
above 2 or 3 counts, one of two things should be done. Either a small adjustment of
the command scaling of the external drive is required or the "Calibrate Velocity
Command Voltage" will have to be changed slightly to reduce the following error.
If using the command scaling adjustment on the external drive,(usually a pot)
slowly turn the pot in one direction. If the Following Error becomes larger, turn the
pot in the opposite direction. Adjust the pot to obtain the lowest Following Error
possible. Increase the "Calibrate Jog Velocity" in 500 RPM increments until the
maximum drive velocity is reached, adjusting the command scaling pot as
necessary at each increment.
If the external drive has a fixed command scaling, the "Calibrate Velocity
Command Voltage" will have to be adjusted. Change this value up or down 0.1 volts
in one direction. If the"Following Error" increases, set the value 0.1 volts in the
opposite direction until the"Following Error" is minimized.
If the "Following Error decreases, continue in the same direction until it is
minimized. Again, step up the "Calibrate Jog Velocity" in 500 RPM increments
until the maximum drive velocity is reached, adjusting the "Calibrate Velocity
Command Voltage" as necessary at each increment. After completion of the
"Following Error" adjustment, depress the space bar to stop the motor. Enter a
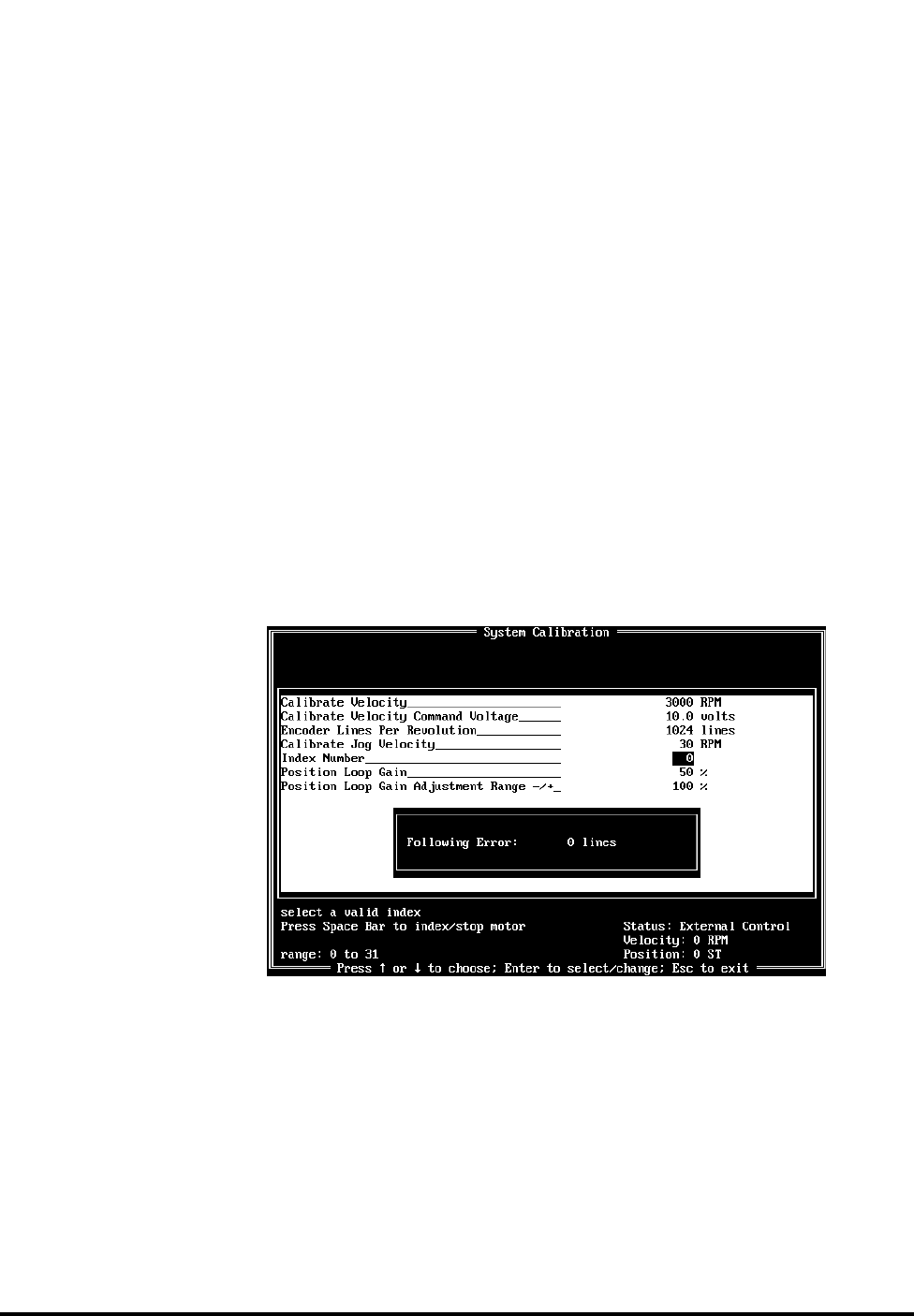
carriage return to position the cursor on the "Index Number" selection. See Figure 48.
Figure 7 System Calibration (Index Number)
It is at this point that the motor should be connected to the load. Ensure that the
power is removed from the external drive and connect the motor. Reapply power to
the external drive. This section assumes that an index has been programmed in the
"Index Setup" section of the program. This index represents the motion in the
application. The purpose of running an index is to optimize the "Position Loop
Gain" adjustment of the 520 PMC.