



















Chapter 7 Usage of Various Functions
7-24
(e) Integral windup
All devices to be controlled, actuator, has limitation of operation. The motor has speed limit, the valve can not flow over
the maximum value. When the control system has wide PV range, the PV can be over the maximum output value of
actuator. At this time, the actuator keeps the maximum output regardless the change of PV while the PV is over the
maximum output value of actuator. It can shorten the lifetime of actuator.
When the I control action is used, the deviation term is integrated continuously. It makes the output of I control action
very large, especially when the response characteristic of system is slow.
This situation that the output of actuator is saturated, is called as ‘windup’. It takes a long time that the actuator returns to
normal operating state after the windup was occurred.
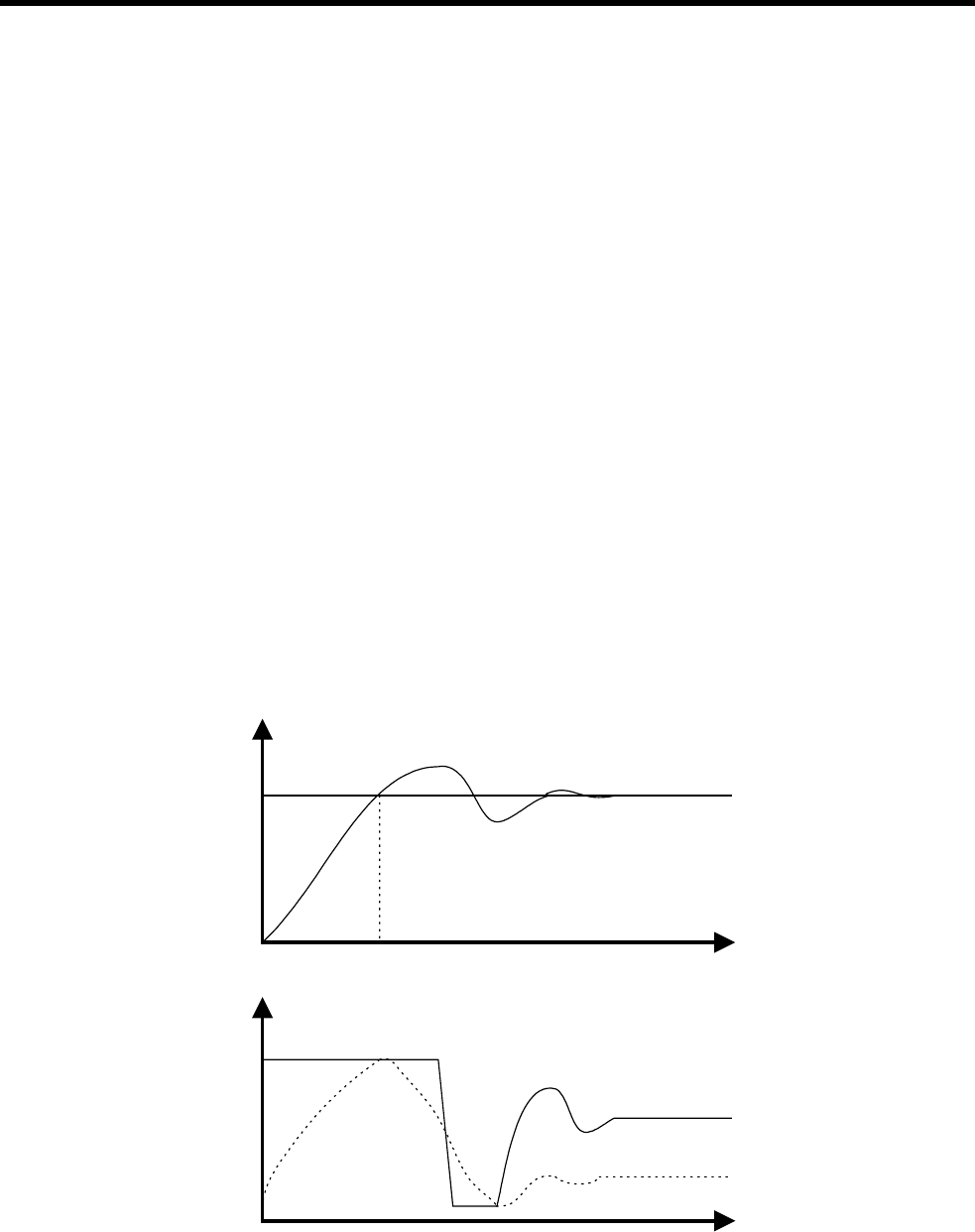
The Fig. 7.8 shows the PV and MV of PI control system when the windup occurs. As shown as the Fig. 7.8, the actuator
is saturated because of the large initial deviation. The integral term increase until the PV reaches to the SV (deviation =
0), and then start to decrease while the PV is larger than SV (deviation < 0). However, the MV keeps the saturated status
until the integral term is small enough to cancel the windup of actuator. As the result of the windup, the actuator will
output positive value for a while after the PV reached to the SV, and the system show a large overshoot. A large initial
deviation, load disturbance, or miss-operation of devices can cause windup of actuator.
There are several methods to avoid the windup of actuator. The most popular methods are adding another feedback
system to actuator, using the model of actuator and stop integrating when actuator is saturated.
.
Fig. 7.8 Example of integral windup