



















Chapter 7 Usage of Various Functions
7-86
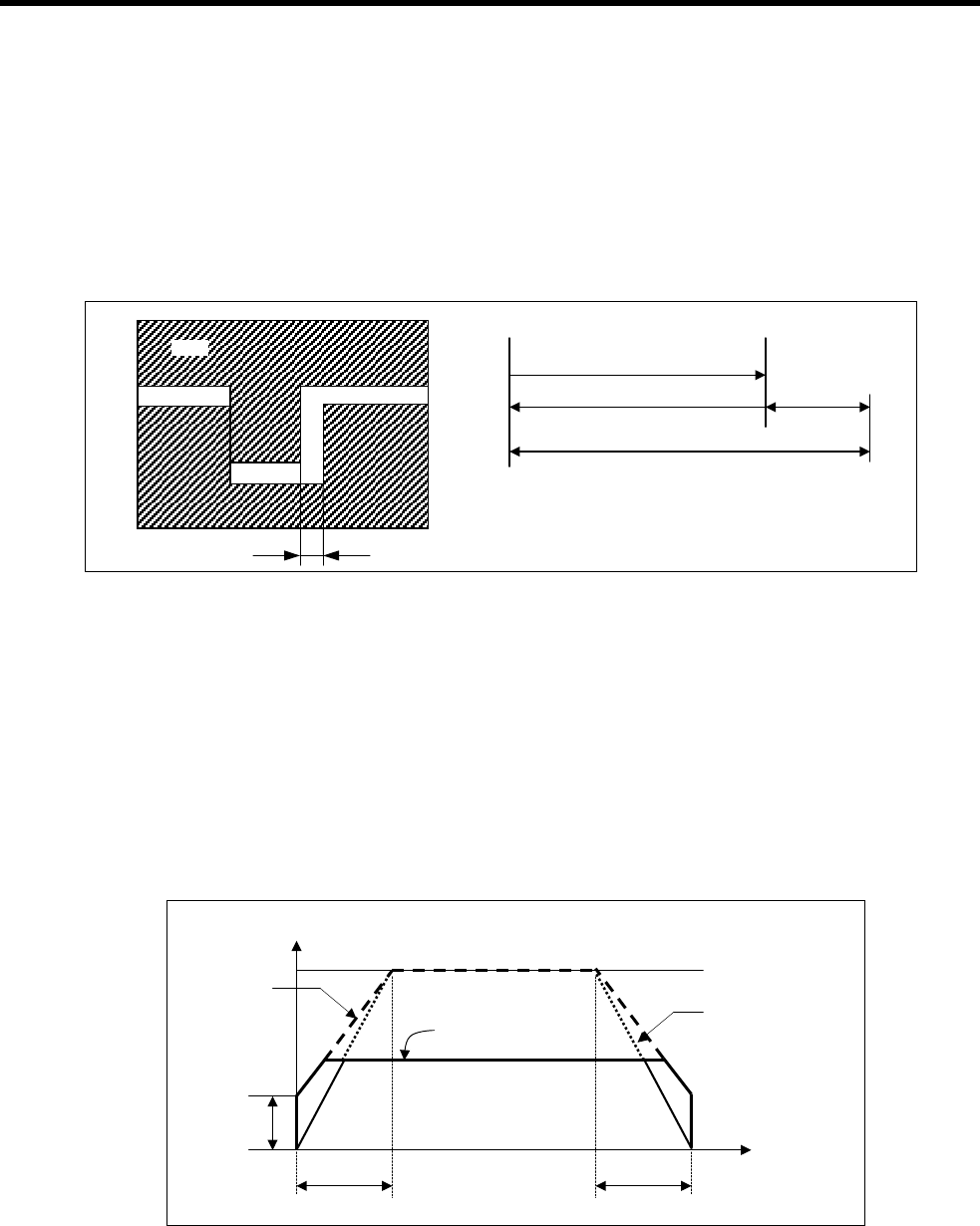
(B) Backlash Compensation Amount
• The tolerance that the machine does not work by the wear when the rotation direction changes in case that a gear,
screw etc is combined to run at the motor axle, is called as ‘Backlash”.
Therefore, when you change the rotation direction, it is required to add the backlash compensation amount to the
positioning amount for output.
• The setting range is 0 ∼ 1,000(unit: Pulse) at each axis.
• If the position moved 1m to the right and again 1m to the left, it is not possible to reach the original position by
backlash. At this time, it is required to add backlash compensation amount.
(C)
Bias Speed
• As the stepping motor has unstable torque near zero speed, the start speed shall be set in the beginning of operation
in command to smooth the rotation of motor and reduce the positioning time. The speed to be set at this time is called
“Bias Speed”.
• The setting range is 5∼10,000(unit: 1pps) at each axis.
• Bias speed shall be used for the main axis of
① positioning operation by setting command,
② origin return operation,
③ JOG operation.
(D)
Speed Limit
• max. Speed available to set for positioning operation.
• The setting range is 5~100,000 (unit : 1pps).
• The operation speed of positioning operation, origin return speed and Jog operation speed is influenced by speed
limit and if they are set as higher value than speed limit, error will occur.
Direction change
Backlash
Gea
r
Backlash
1m movement right side (normal)
Transfer amount including Backlash compensation amount
1m movement left side (reverse)
A
cce
l
era
ti
on
time
Time
Positioning speed
Origin return speed
JOG
Speed
Interpolation operation
speed
Speed
Bias speed
Bias speed
setting action
S
p
eed limit
Bias speed not-setting
action
D
ece
l
era
ti
on
time