



















Chapter 7 Usage of Various Functions
7-81
(3)
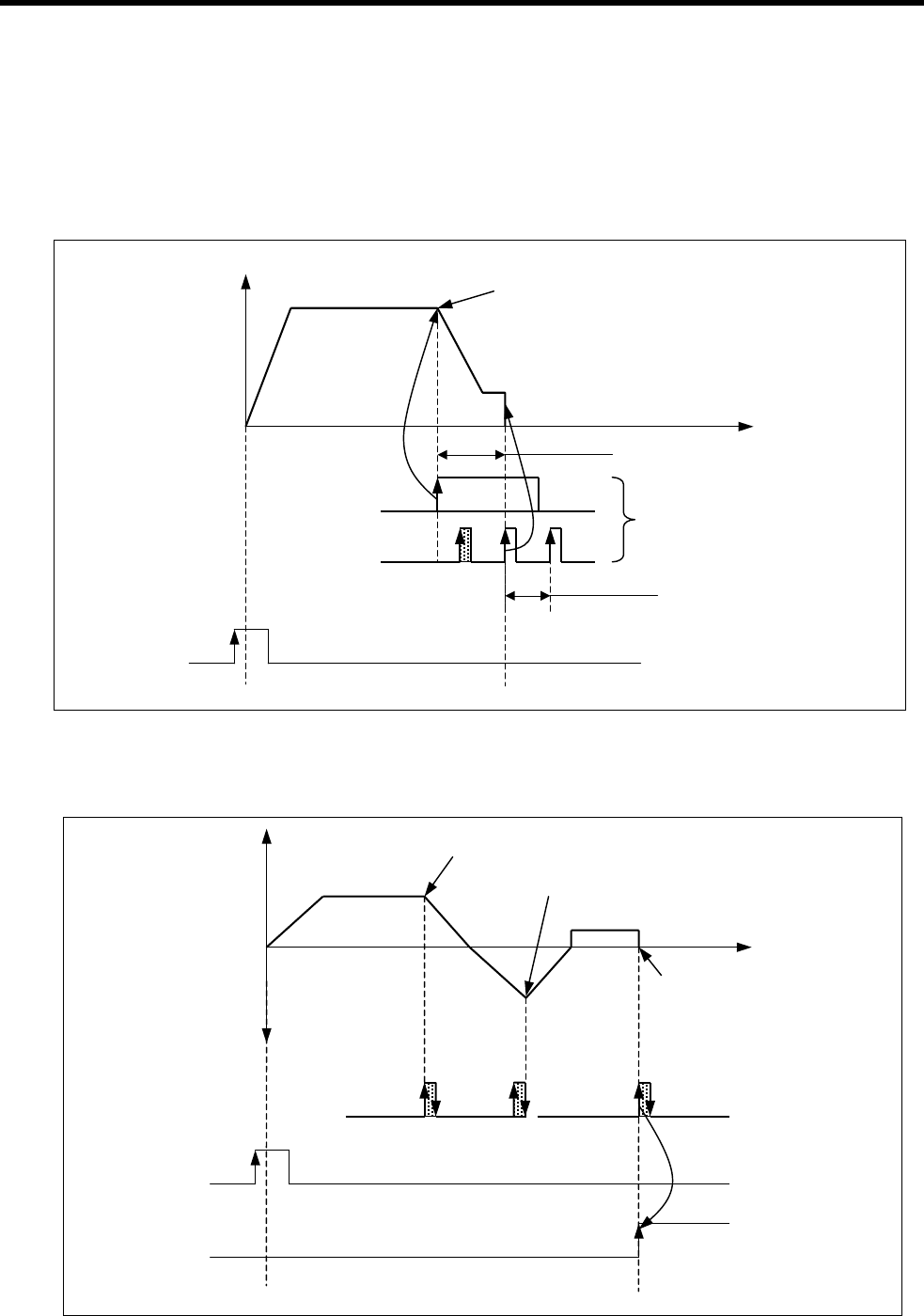
Origin Detection after Deceleration when Approximate origin turns on
This is the method using the approximate origin and origin signal and the action by origin return command is as follows.
(A) It accelerates to the setting origin return direction and acts by origin return high speed.
(B) In this case, if approximate origin as external input is entered, it decelerates and acts by origin return low speed.
(C) If encounters the origin signal as external input signal while the origin return low speed is active, the origin shall be
determined and it stops.
(4) Origin Detection by approximate origin
This is the method using the approximate origin signal only.
Speed
Time
Origin return low speed
Origin signal
Approximate
origin signal
Transfer amount after approximate origin “ON”
1 rotation of SERVO motor (PG1 rotation)
Origin return
command
Deceleration when approximate return “ON”
When origin return speed decelerates
by approximate origin, the origin will
not be determined by the origin signal.
Origin return high speed
Normal rotation
Time
Origin return high speed
Ori
g
in return low s
p
eed
External input high limi
t
Origin return
command
Origin determined
state
Reverse rotation
Direction conversion at the rising edge of approximate origin signal
Origin determination
Direction conversion at the falling edge of approximate origin signal