



















Chapter 7 Usage of Various Functions
7-80
7) Return to Origin(POSORG : Rising edge ↑)
• Return to Origin (homing) is carried out to confirm the origin of the machine when applying the power.
• In case of Return to Origin, it is required to set Return to Origin parameter for each axis.
• If the origin position is determined by origin return, the origin detection signal is not recognized during positioning operation.
(1)
Origin return method
• Method by approximate origin (approach DOG)
- Origin return processing method by approximate origin (approach DOG) has 3 kinds of method as follows.
(A) Origin detection when approximate origin turns off
(B) Origin detection after deceleration when approximate origin turns on
(C) Origin detection by approximate origin
• The items that effects to the origin return from parameter are as follows.
(A) Origin return speed (high speed, low speed)
(B) Origin return dwell time
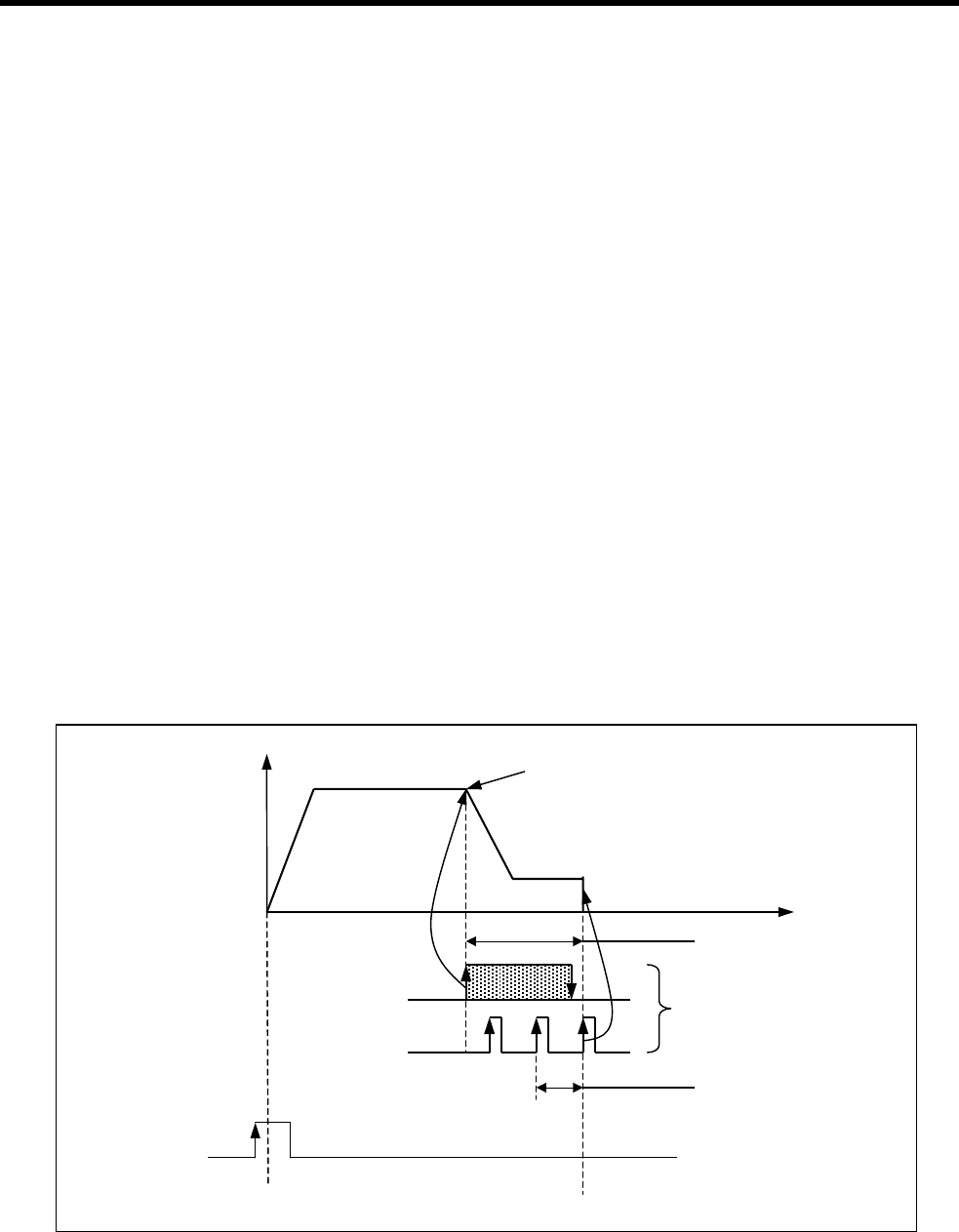
(2) Origin Detection when Approximate origin turns off
This is the method using the approximate origin and origin signal and the action by origin return command(POSORG) is as
follows.
(A) It accelerates to the setting origin return direction and acts by origin return high speed.
(B) In this case, if approximate origin as external input is entered, it decelerates and acts by origin return low speed.
(C) If origin signal as external input is entered after the approximate origin signal has changed from ”On” to “Off”, it stops.
S
p
eed
Time
Origin return low speed
Origin signal
Approximate origin signal
Transfer amount after approximate origin “ON”
1 rotation of SERVO motor (PG1 rotation)
Origin return
command
Deceleration when approximate return “ON”
While the approximate origin “ON”,
the origin will not be determined by
the origin signal.
Origin return high speed