

















Chapter 7 Usage of Various Functions
7-105
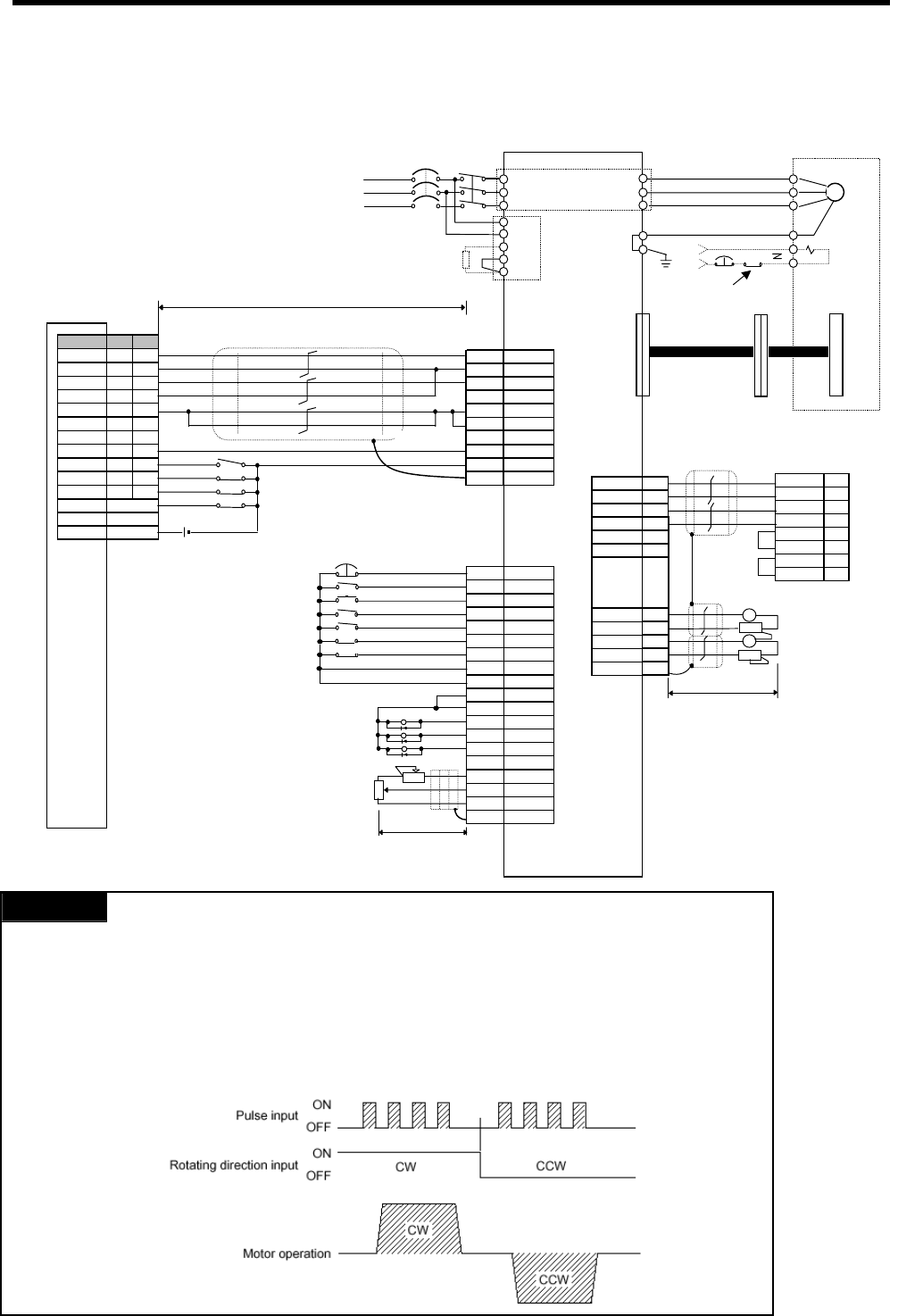
3) Wiring with servo motor driver(MR-J2/J2S-□A)
Remark
1) The rated input for the origin of K120S is DC 24V.
2) Input points for origin, approximate origin point, and upper/lower limit signal are fixed but, if they’re not used you
able to use them general input point. You can use emergency stop with the command(POSCTR)
3) Positioning phase of K120S is as follow: Set the input mode of a step mode driver to 1 phase input mode is
determined by rotating direction input.
* 3
Analog torque limit
+10V/max. current
Max: 2m
Outer emergency stop
Servo : ON
Reset
PID
Torque Limit
Forward direction position limit
Reverse direction position Limit
*3
*3
RA1
RA2
RA3
Power
3Phase 200VAC
NF
RD
SD
GND
GND
RS
CS
DR
ER
L1
L2
L3
L11
L21
CTE2
D
P
CN1
A
PP
3
SG 10
NP 2
OPC 11
COM 9
EMG 15
SON 5
RES 14
PC 8
TL 9
LSP 16
LSN 17
SG 10
SG 20
VDD 3
COM 13
ALM 18
ZSP 19
TLC 6
P15R 11
TLA 12
LG 1
SD Plate
CN1E
TE11
MR-J2S- A
U
V
W
PE
PE
HC-MF HA-FF
Series motor
U
V
W
E
EMG
24VDC
CN2
B1
B2
SM
2
1
12
TxD
RxD
LG
11
5
15
LG
LG
LG
4
3
14
13
Plate
GND
RS
CS
DR
ER
CN3
A
A
Monitor output
Max 10mA 10k
10k
Personal
computer
Within 2m
Within 2m
MC
Pulse
DC24V
K7M-DRT**U
P40 P41
Signal
Ch0 Ch1
Direction P42 P43
Common COM0 COM1
Common COM2 COM2
Input +24V P P
Origin
P04 P06
P05 P07
High Limit P01 P03
Low Limit
P00
P02
Emergency
Input point
Common COM0(Input)
OP 14
LG 1
SD Plate
DOG
* 1
* 3
failure
zero speed detection
in torque limi
t
OPP of Servo ON signal
Cutoff by alarm signal
electronic brake
detector