



















Chapter 7 Usage of Various Functions
7-75
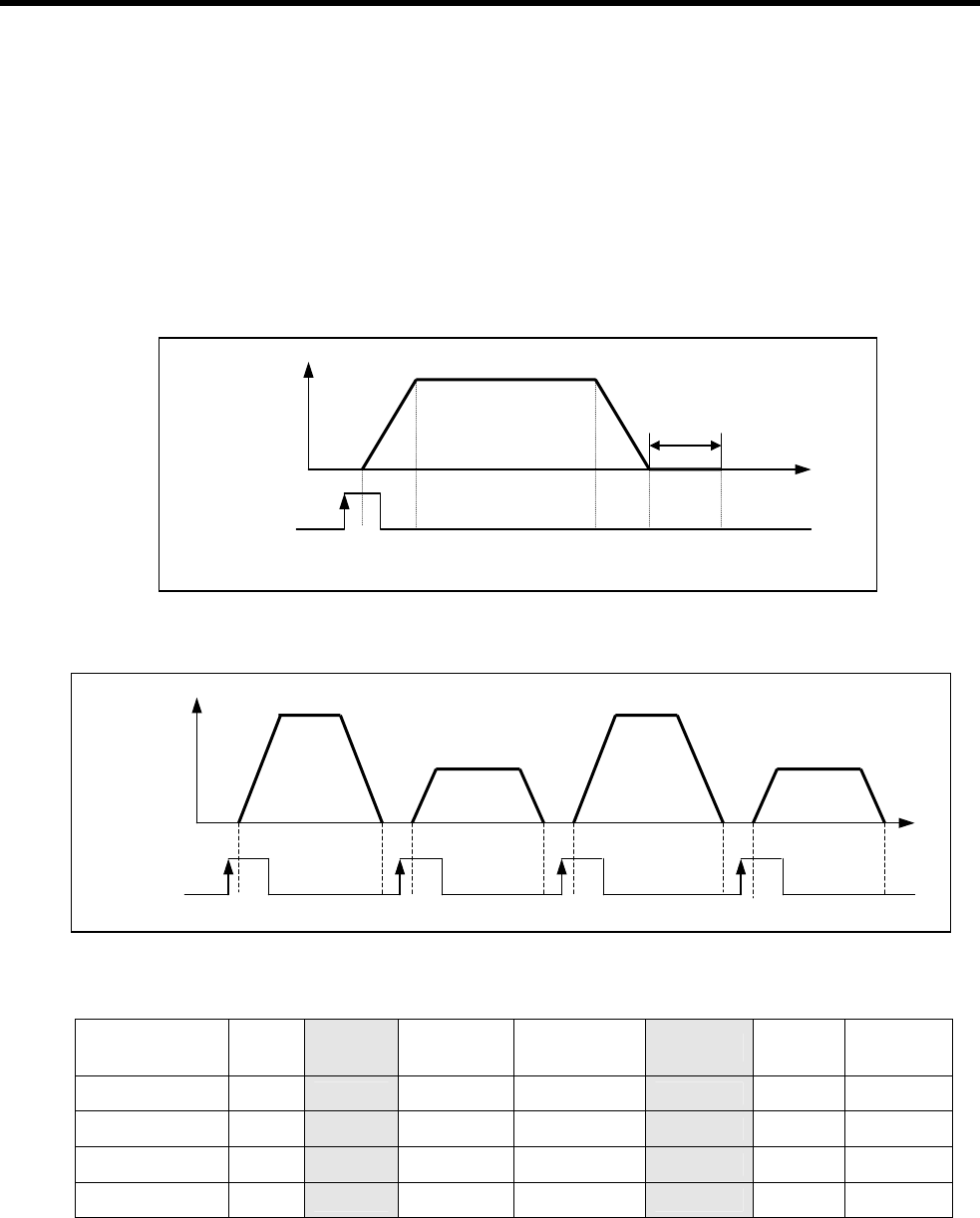
3) Operation Mode
(1)
End Operation
A) With one time start command(rising edge of POSIST command), the positioning to the goal position is executed and
the positioning shall be completed at the same time as the dwell time proceeds.
B) This operation mode can be used as last positioning data of pattern operation.
C) Operation direction shall be determined by position address.
D) Operation action is trapezoid type operation that has acceleration, constant, deceleration section according to the
setting speed and position data.
[Example] End operation
• Parameter setting
No. of program
start command
Step
No.
Coordinate
Operation
mode
Operation
method
Goal address
Speed
(pps)
Dwell time
(㎳)
1 1 Absolute End Single 10,000 50,000 0
2 2 Absolute End Single 20,000 20,000 0
3 3 Absolute End Single 30,000 50,000 0
4 4 Absolute End Single 40,000 20,000 0
Dwell time
S
p
eed
Time
On
Start command
(POSIST
)
On
Start command
Operation
step no.: 1
Operation
step no.: 2
Operation
step no.: 3
Operation
step no.: 4
Time
S
p
eed