

















Chapter 7 Usage of Various Functions
7-102
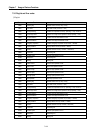
2) Error code
Error
code
Condition
Operation
Corrective action
H10 Acceleration time of basic parameter is out of range
Stop Set Acceleration time within 0~10,000 range
H11 Deceleration time of basic parameter is out of range
Stop Set Deceleration time within 0~10,000 range
H12 Speed limit of basic parameter is out of range
Stop
Set speed limit within 5~ 100,000 range.
H13 Bias speed of basic parameter is out of range
Stop
Set bias speed within 5 ~ 100,000 range.
H14 Backlash compensation of basic parameter is out of range
Stop
Set backlash compensation within 0~ 1,000 range
H15 JOG high speed of parameter is out of range
Stop
Set JOG high speed within bias speed ~ speed limit
H16 JOG low speed of parameter is out of range
Stop
Set JOG high speed within 5 ~ JOG high speed
H17 Origin return high speed of parameter is out of range
Stop
Set Origin return high speed within bias speed ~ speed limit
H18 Origin return low speed of parameter is out of range
Stop
Set Origin return low speed within bias speed ~ Origin return high speed
H19 Dwell time of parameter is out of range
Stop
Set Dwell time within 0 ~ 10000.
H20 Operation speed of positioning parameter is out of range
Stop
Set Operation speed within bias speed ~ speed limit
H21 Dwell time of pulse out parameter is out of range
Stop
Set Dwell time of pulse out parameter within 0 ~ 10000
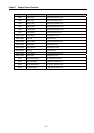
H30 POSIST command can’t be executed during operation
Operating Check if positioning operation is executing when POSIST signal occur.
H31 POSIST command can’t be executed when output is prohibited
Stop
Check if output is prohibited when POSIST signal occur. Output can be
enabled by POSCTR command.
H32
POSIST command can’t be executed when origin is not
determined
Stop
Check if origin is not designated when POSIST signal occur.
Origin can be designated by POSORG or POSPRS command.
H33 Step No. of POSIST command can’t be over 20
Stop
Set step No. within 0~20
H34 POSDST command can’t be executed during operation
Operating Check if positioning operation is executing when POSDST signal occur.
H35
POSDST command can’t be executed when output is
prohibited
Stop
Check if output is prohibited when POSDST signal occur. Output can be
enabled by POSCTR command.
H36
POSDST command can’t be executed when origin is not
determined
Stop
Check if origin is not designated when POSDST signal occur.
Origin can be designated by POSORG or POSPRS command.
H37 Operation speed of POSDST command is out of range
Stop
Set Operation speed within 5 ~ speed limit
H38 POSVEL command can’t be executed during operation
Operating Check if positioning operation is executing when POSVEL signal occur.
H39
POSVEL command can’t be executed when output is
prohibited
Stop
Check if output is prohibited when POSVEL signal occur. Output can be
enabled by POSCTR command.
H3A Operation speed of POSVEL command is out of range
Stop
Set Operation speed within 5 ~ speed limit
H3B POSJOG command can’t be executed during operation
Operating Check if positioning operation is executing when POSJOG signal occur.
H3C
POSJOG command can’t be executed when output is
prohibited
Stop
Check if output is prohibited when POSJOG signal occur. Output can be
enabled by POSCTR command.
H3D Direction can’t be changed in JOG operation
Operating
Change direction after JOG operation end.
H3E PWM command can’t be executed during operation
Operating Check if positioning operation is executing when PWM signal occur.
H3F PWM command can’t be executed when output is prohibited
Stop
Check if output is prohibited when PWM signal occur. Output can be enabled
by POSCTR command.
H40 PWM period of PWM command is out of range
Stop
Set period within 1 ~ 20,000
H41 Off duty of PWM command is out of range
Stop
Set duty within 0 ~ 100
H42 POSSOR command is available during operating only
Stop Check if positioning operation is not executing when POSSOR signal occur.
H43 Speed override value of POSSOR command is out of range
Operating
Set override value within 5 ~ speed limit