Overview 07/06 Danaher Motion
20 Initial Release M-S2-021-11
2.5.3. T
RANSITIONS OF THE STATUS MACHINE
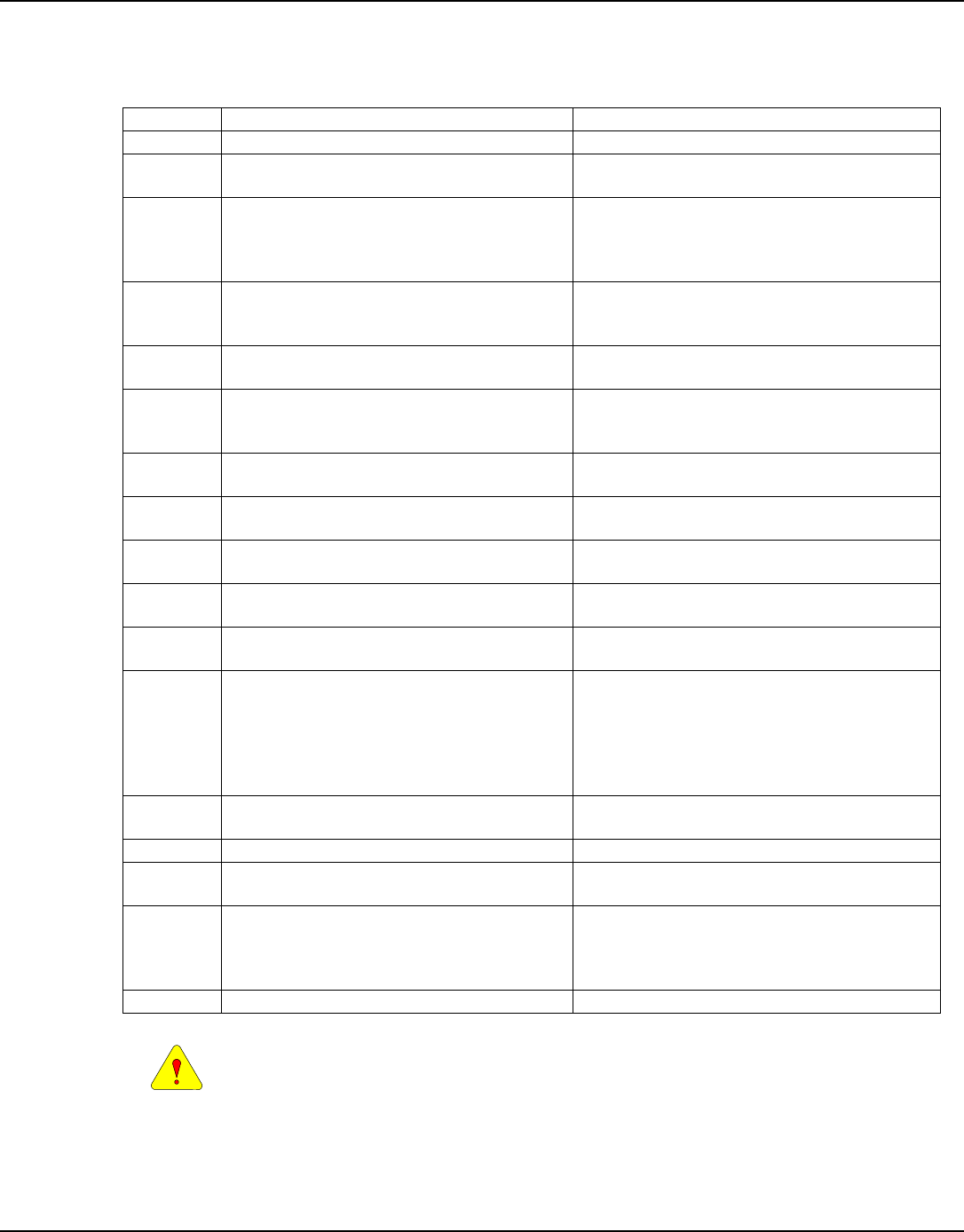
The state transitions are affected by internal events (e.g. switching off the DC-link voltage) and by the flags
in the control word (bits 0,1,2,3,7).
Transition Event Action
0 Reset Initialization
1
Initialization completed successfully. S200 is
ready to operate.
none
2
Bit 1 Disable Voltage and Bit 2 Quick Stop
are set in the control word (Shutdown
command).
DC-link voltage may be present.
none
3
Bit 0 is also set
(Switch On command)
Output stage is switched on (enabled), provided
that the hardware enable is present (logical
AND). Drive has torque.
4
Bit 3 is also set
(Enable Operation command)
Motion function is enabled, depending on the
mode that is set.
5
Bit 3 is canceled
(Disable Operation command)
Motion function is inhibited. Drive is stopped,
using the relevant ramp (mode-dependent). The
present position is maintained.
6
Bit 0 is canceled
(Shutdown command)
Output stage is disabled. Drive has no torque.
7
Bits 1 and 2 are canceled
(Quick Stop / Disable Voltage command)
none
8
Bit 0 is canceled
(Shutdown command)
Output stage is disabled. Drive has no torque.
9
Bit 1 is canceled
(Disable Voltage command)
Output stage is disabled. Drive has no torque.
10
Bits 1 and 2 are canceled
(Quick Stop / Disable Voltage command)
Motion function is enabled, depending on the
mode that is set.
11
Bit 2 is canceled
(Quick Stop command)
Drive is stopped with the emergency braking
ramp. The output stage remains enabled.
Setpoints are canceled (motion block number,
digital setpoint, speed for jogging or homing).
Bit 2 must be set again before any further
motion tasks can be performed.
12
Bit 1 is canceled
(Disable Voltage command)
Output stage is disabled. Drive has no torque.
13 Fault reaction active Execute appropriate fault reaction
14 Fault reaction is completed
Drive function is disabled. The power section
may be switched off.
15 "Fault Reset" command received from host
A reset of the fault condition is carried out if no
fault exists currently on the drive.After leaving
the state Fault the Bit7 'Reset Fault' of the
controlword has to be cleared by the host
16 Bit 2 is set Motion function is enabled again.
CAUTION
If the servo amplifier is operated through the control word / status word, then no control
commands may be sent through another communication channel (RS232, CANopen, ASCII
channel, Option board).
























































































