



















USER MANUAL Chapter 6 Programming Motion • 65
command (ST) can be issued at any time to decelerate the motor to a stop before it reaches its final
position.
An incremental position movement (IP) may be specified during motion as long as the additional move
is in the same direction. Here, the user specifies the desired position increment, n. The new target is
equal to the old target plus the increment, n. Upon receiving the IP command, a revised profile will be
generated for motion towards the new end position. The IP command does not require a begin. Note:
If the motor is not moving, the IP command is equivalent to the PR and BG command combination.
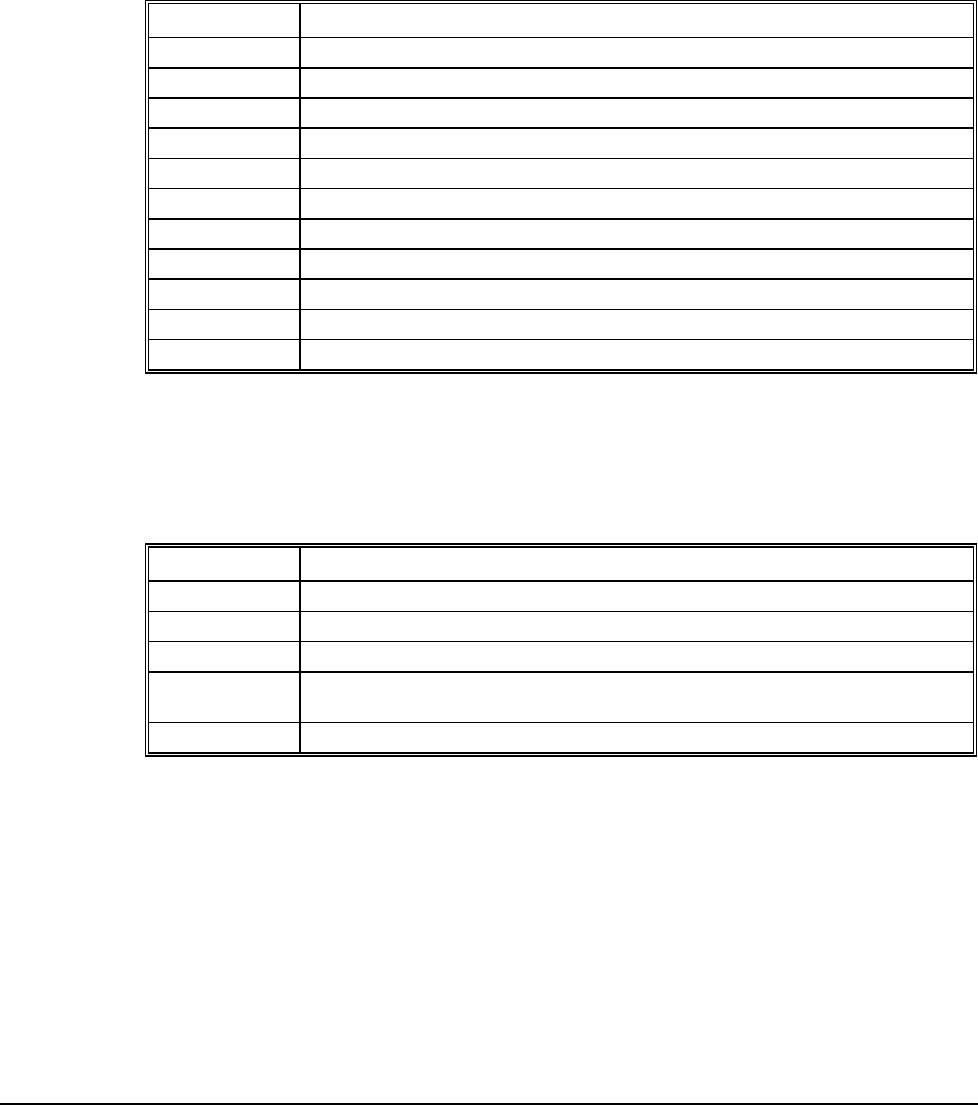
Command Summary - Independent Axis
COMMAND DESCRIPTION
PR x,y,z,w Specifies relative distance
PA x,y,z,w Specifies absolute position
SP x,y,z,w Specifies slew speed
AC x,y,z,w Specifies acceleration rate
DC x,y,z,w Specifies deceleration rate
BG XYZW Starts motion
ST XYZW Stops motion before end of move
IP x,y,z,w Changes position target
IT x,y,z,w Time constant for independent motion smoothing
AM XYZW Trippoint for profiler complete
MC XYZW Trippoint for "in position"
The lower case specifiers (x,y,z,w) represent position values for each axis.
The DMC-13X8 also allows use of single axis specifiers such as PRY=2000.
Operand Summary - Independent Axis
OPERAND DESCRIPTION
_ACx Return acceleration rate for the axis specified by ‘x’
_DCx Return deceleration rate for the axis specified by ‘x’
_SPx Returns the speed for the axis specified by ‘x’
_PAx
Returns current destination if ‘x’ axis is moving, otherwise returns the current commanded
position if in a move.
_PRx Returns current incremental distance specified for the ‘x’ axis
Example - Absolute Position Movement
PA 10000,20000 Specify absolute X,Y position
AC 1000000,1000000 Acceleration for X,Y
DC 1000000,1000000 Deceleration for X,Y
SP 50000,30000 Speeds for X,Y
BG XY Begin motion
Example - Multiple Move Sequence
Required Motion Profiles: