



















USER MANUAL Chapter 6 Programming Motion • 77
Example:
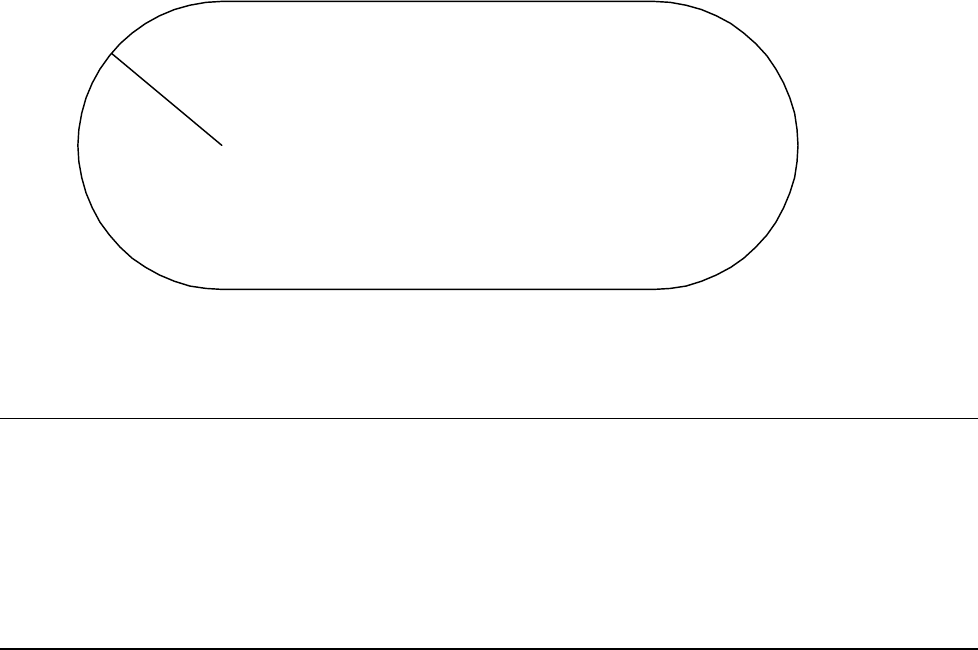
Traverse the path shown in Fig. 6.3. Feedrate is 20000 counts/sec. Plane of motion is XY
VM XY Specify motion plane
VS 20000 Specify vector speed
VA 1000000 Specify vector acceleration
VD 1000000 Specify vector deceleration
VP -4000,0 Segment AB
CR 1500,270,-180 Segment BC
VP 0,3000 Segment CD
CR 1500,90,-180 Segment DA
VE End of sequence
BGS Begin Sequence
The resulting motion starts at the point A and moves toward points B, C, D, A. Suppose that we
interrogate the controller when the motion is halfway between the points A and B.
The value of _AV is 2000
The value of _CS is 0
_VPX and _VPY contain the absolute coordinate of the point A
Suppose that the interrogation is repeated at a point, halfway between the points C and D.
The value of _AV is 4000+1500
π+2000=10,712
The value of _CS is 2
_VPX,_VPY contain the coordinates of the point C
C (-4000,3000)
R = 1500
B (-4000,0)
D (0,3000)
A (0,0)
Figure 6.3 - The Required Path
Electronic Gearing
This mode allows up to 4 axes to be electronically geared to some master axes. The masters may rotate
in both directions and the geared axes will follow at the specified gear ratio. The gear ratio may be
different for each axis and changed during motion.
The command GAXYZW specifies the master axes. GR x,y,z,w specifies the gear ratios for the
slaves where the ratio may be a number between +/-127.9999 with a fractional resolution of .0001.