



















USER MANUAL Chapter 6 Programming Motion • 67
speed, and then decelerate such that the final position agrees with the command position, PR. The Z
axis accelerates, but before the specified speed is achieved, must begin deceleration such that the axis
will stop at the commanded position. All 3 axes have the same acceleration and deceleration rate,
hence, the slope of the rising and falling edges of all 3 velocity profiles are the same.
Independent Jogging
The jog mode of motion is very flexible because speed, direction and acceleration can be changed
during motion. The user specifies the jog speed (JG), acceleration (AC), and the deceleration (DC)
rate for each axis. The direction of motion is specified by the sign of the JG parameters. When the
begin command is given (BG), the motor accelerates up to speed and continues to jog at that speed
until a new speed or stop (ST) command is issued. If the jog speed is changed during motion, the
controller will make a accelerated (or decelerated) change to the new speed.
An instant change to the motor position can be made with the use of the IP command. Upon receiving
this command, the controller commands the motor to a position which is equal to the specified
increment plus the current position. This command is useful when trying to synchronize the position
of two motors while they are moving.
Note that the controller operates as a closed-loop position controller while in the jog mode. The DMC-
13X8 converts the velocity profile into a position trajectory and a new position target is generated
every sample period. This method of control results in precise speed regulation with phase lock
accuracy.
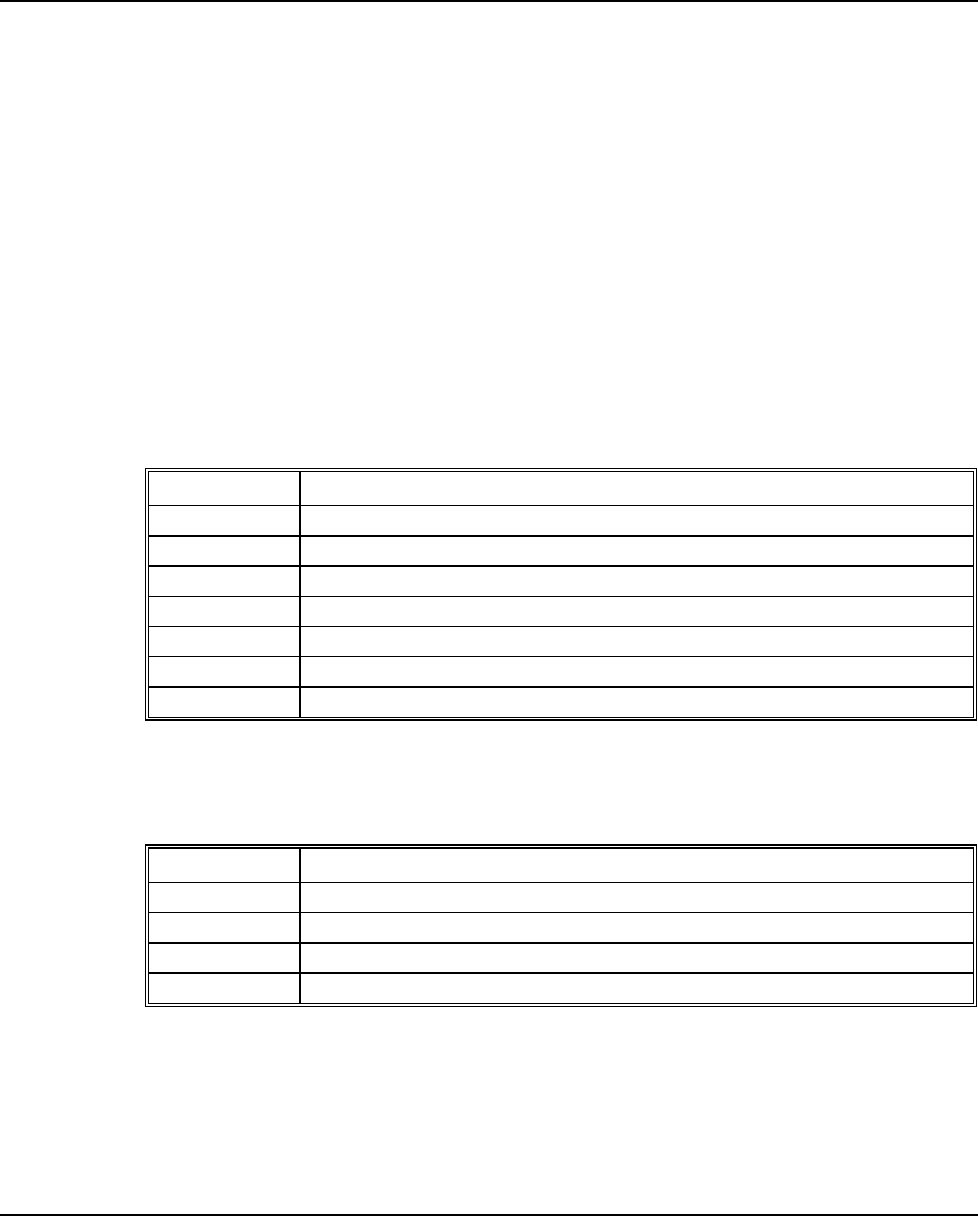
Command Summary - Jogging
COMMAND DESCRIPTION
AC x,y,z,w Specifies acceleration rate
BG XYZW Begins motion
DC x,y,z,w Specifies deceleration rate
IP x,y,z,w Increments position instantly
IT x,y,z,w Time constant for independent motion smoothing
JG +/-x,y,z,w Specifies jog speed and direction
ST XYZW Stops motion
Parameters can be set with individual axes specifiers such as JGY=2000 (set jog speed for Y axis to
2000) or ACYH=400000 (set acceleration for Y and H axes to 400000).
Operand Summary - Independent Axis
OPERAND DESCRIPTION
_ACx Return acceleration rate for the axis specified by ‘x’
_DCx Return deceleration rate for the axis specified by ‘x’
_SPx Returns the jog speed for the axis specified by ‘x’
_TVx Returns the actual velocity of the axis specified by ‘x’ (averaged over .25 sec)
Example - Jog in X only
Jog X motor at 50000 count/s. After X motor is at its jog speed, begin jogging Z in reverse direction at
25000 count/s.
#A