



















FX
3G
/FX
3U
/FX
3UC
PLC User's Manual - Analog Control Edition
PID Instruction (FNC 88)
M-13
3 Parameter
3.2 Details of Parameters
K
FX
3U
-4AD-PNK
-ADP
L
FX
3U
-4AD-TC
-ADP
M
PID Instruction
(FNC 88)
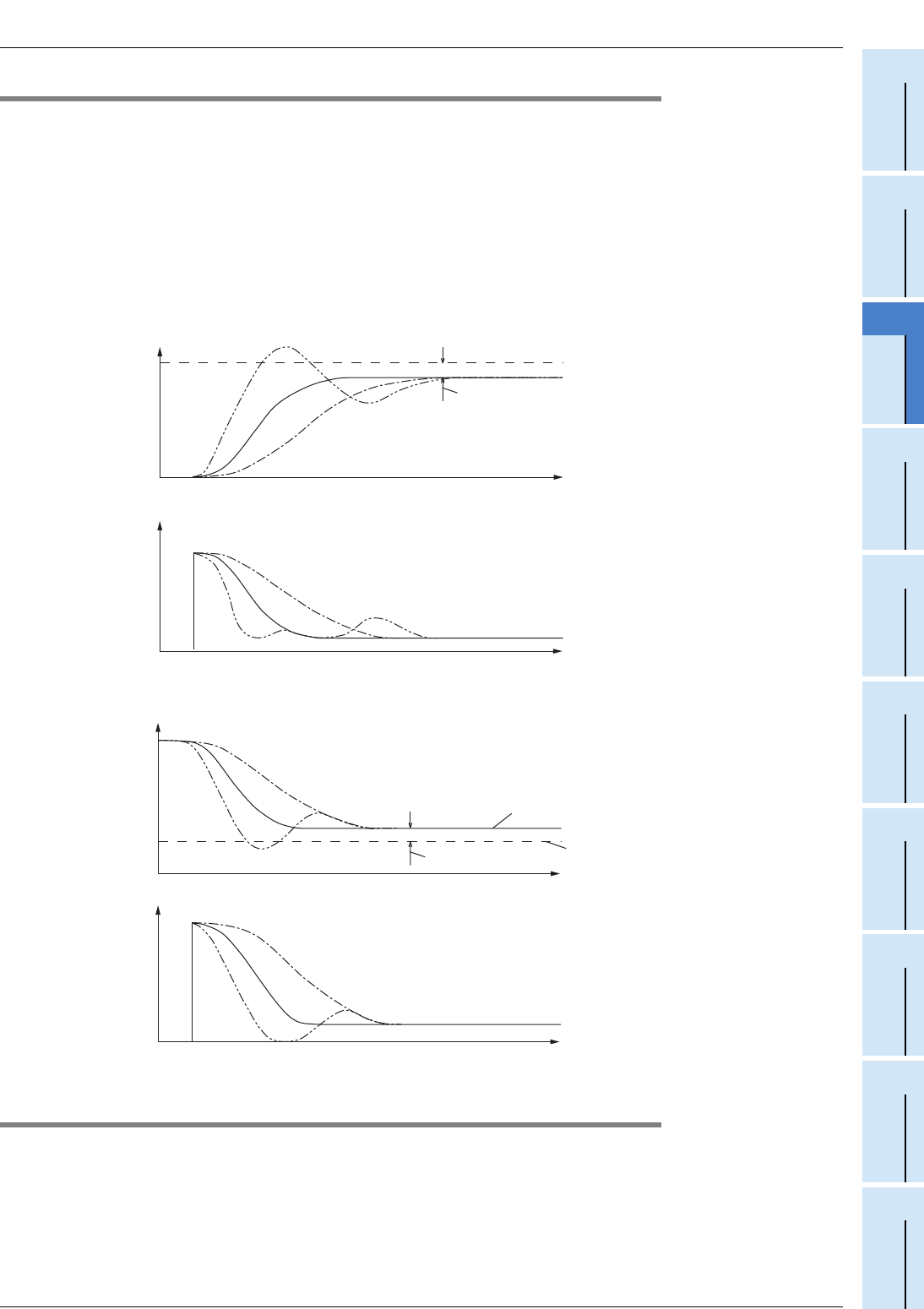
3.2.4 Proportional gain (KP): (S3)+3
Setting range: 1 to 32767[%]
PID control: Proportional operation
During the proportional operation, the output (MV) increases in proportion to the deviation (difference
between the target value (SV) and the measured value (PV)).
This deviation is called proportional gain (Kp), and expressed in the following relational expression:
Output (MV) = Proportional gain (K
P) x Deviation (EV)
The reciprocal of the proportional gain (K
P) is called proportional band.
As the proportional gain (KP) is larger (as shown in the example below), the motion to let the measured value
(PV) be nearer to the target value (SV) becomes stronger.
Example 1: Proportional operation (P operation) in heating (backward operation)
Example 2: Proportional operation (P operation) in cooling (forward operation)
3.2.5 Integral time (TI): (S3)+4
Setting range: 0 to 32767 [ × 100 ms] "0" is handled as "∞" (no integration).
PID operation: Integral operation
During the integral operation, the time after deviation is generated until the integral operation output becomes
the proportional operation output. This is called integral time and is expressed as "T
I".
As T
I becomes smaller, the integral operation becomes stronger.
Time
Target value (SV)
Measured value (PV)
Remaining deviation
Proportional gain
K
P3 > KP2 > KP1
KP3
KP2
KP1
Temperature
Time
Proportional gain
K
P3 > KP2 > KP1
KP3
KP2
KP1
Output (MV)
Time
Temperature
Remaining deviation
Target value (SV)
Measured value (PV)
Time
Output (MV)
Proportional gain
K
P3 > KP2 > KP1
KP3 KP2 KP1
Proportional gain
K
P3 > KP2 > KP1
KP3 KP2 KP1