



















M-28
6 Troubleshooting
FX
3G
/FX
3U
/FX
3UC
PLC User's Manual - Analog Control Edition
PID Instruction (FNC 88)
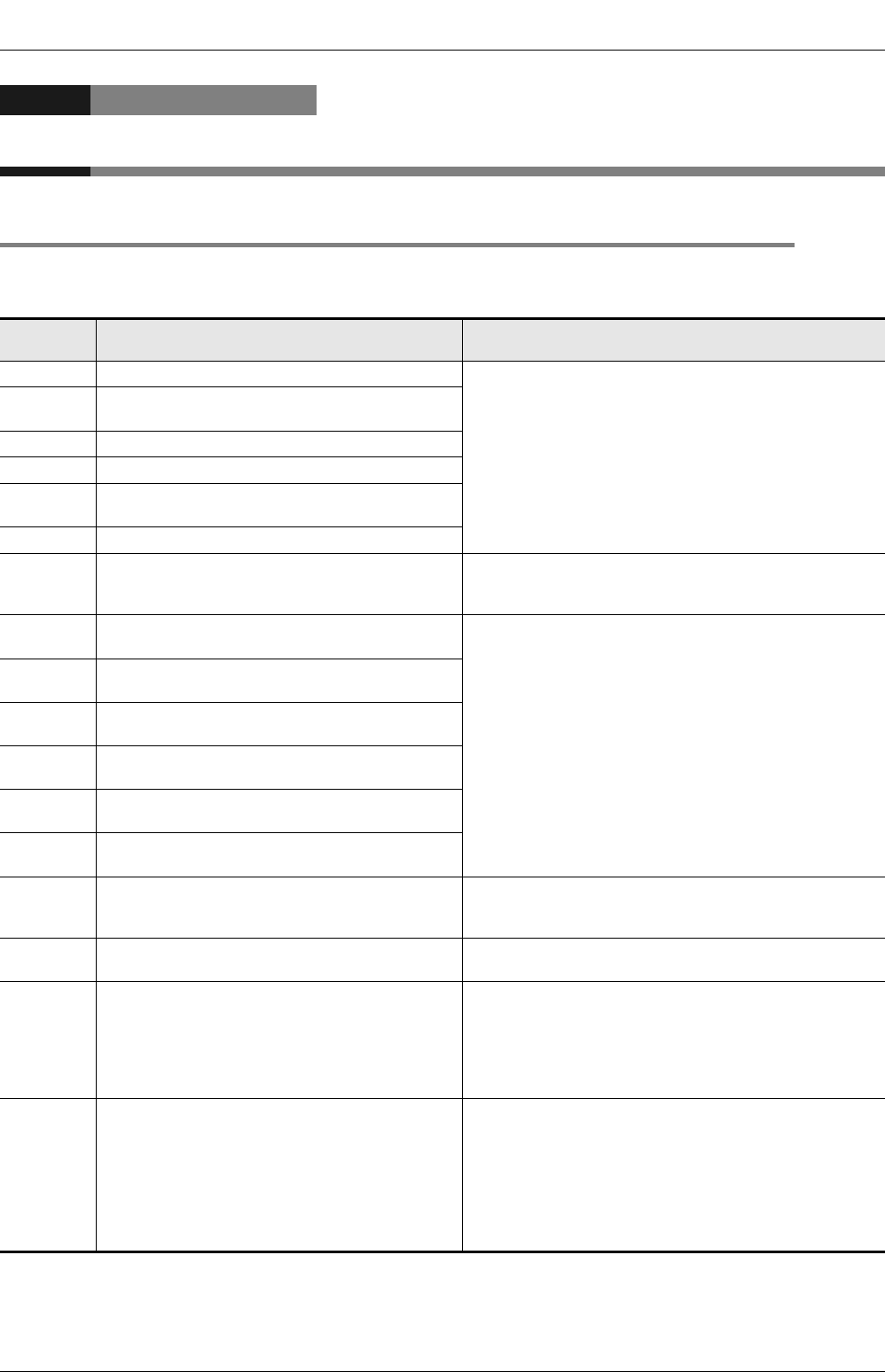
6.1 Error Codes
6. Troubleshooting
6.1 Error Codes
When an error occurs in the set value of a control parameter or the data acquired during the PID operation,
the operation error flag M8067 turns ON, and a corresponding error code is stored in D8067.
Error
code
Error description Action
6730
Incorrect sampling time (TS) (TS ≤ 0)
<PID operation is stopped.>
A data error has occurred in the set value in a control parameter
or in the middle of PID operation.
Check the parameters.
6732
Incorrect input filter constant (α)
(α < 0 or 100 ≤ α)
6733
Incorrect proportional gain (KP) (KP < 0)
6734
Incorrect integral time (TI) (TI < 0)
6735
Incorrect derivative gain (KD)
(K
D < 0 or 201 ≤ KD)
6736
Incorrect derivative time (TD) (TD < 0)
6740
Sampling time (TS) ≤ Operation cycle
<Auto-tuning is continued.>
The operation is continued in the condition "sampling time (TS)
= cyclic time (operation cycle)."
6742
Variation of measured value exceeds limit.
(UPV < −32768 or +32767 < UPV)
<PID operation is continued.>
The operation is continued with each parameter set to the
maximum or minimum value.
6743
Deviation exceeds limit.
(EV < −32768 or +32767 < EV)
6744
Integral result exceeds limit.
(Out of range from −32768 to +32767)
6745
Derivative value exceeds limit due to derivative gain
(K
D).
6746
Derivative result exceeds limit.
(Out of range from −32768 to +32767)
6747
PID operation result exceeds limit.
(Out of range from −32768 to +32767)
6748
PID output upper limit set value < PID output lower limit
set value
<Output upper limit value and output lower limit value are
exchanged for each other. → PID operation is continued.>
Check whether the target settings are correct.
6749
Abnormal PID input variation alarm set value or output
variation alarm set value (Set value < 0)
<Alarm output is not given. → PID operation is continued.>
Check whether the target settings are correct.
6750
<Step response method>
Improper auto-tuning result
<Auto-tuning is finished. → PID operation is started.>
• The deviation at start of auto-tuning is 150 or less.
• The deviation at end of auto-tuning is 1/3 or more of the
deviation at start of auto-tuning.
Confirm the measured value and target value, and then execute
auto-tuning again.
6751
<Step response method>
Auto-tuning operation direction mismatch
<Auto-tuning is forced to finish. → PID operation does not
started.>
The operation direction estimated from the measured value at
the start of auto-tuning was different from the actual operation
direction of the output during auto-tuning.
Correct the relationship among the target value, output value
for auto-tuning and measured value, and then execute auto-
tuning again.