



















M-26
5 Example of Practical Programs (for Step Response Method)
FX
3G
/FX
3U
/FX
3UC
PLC User's Manual - Analog Control Edition
PID Instruction (FNC 88)
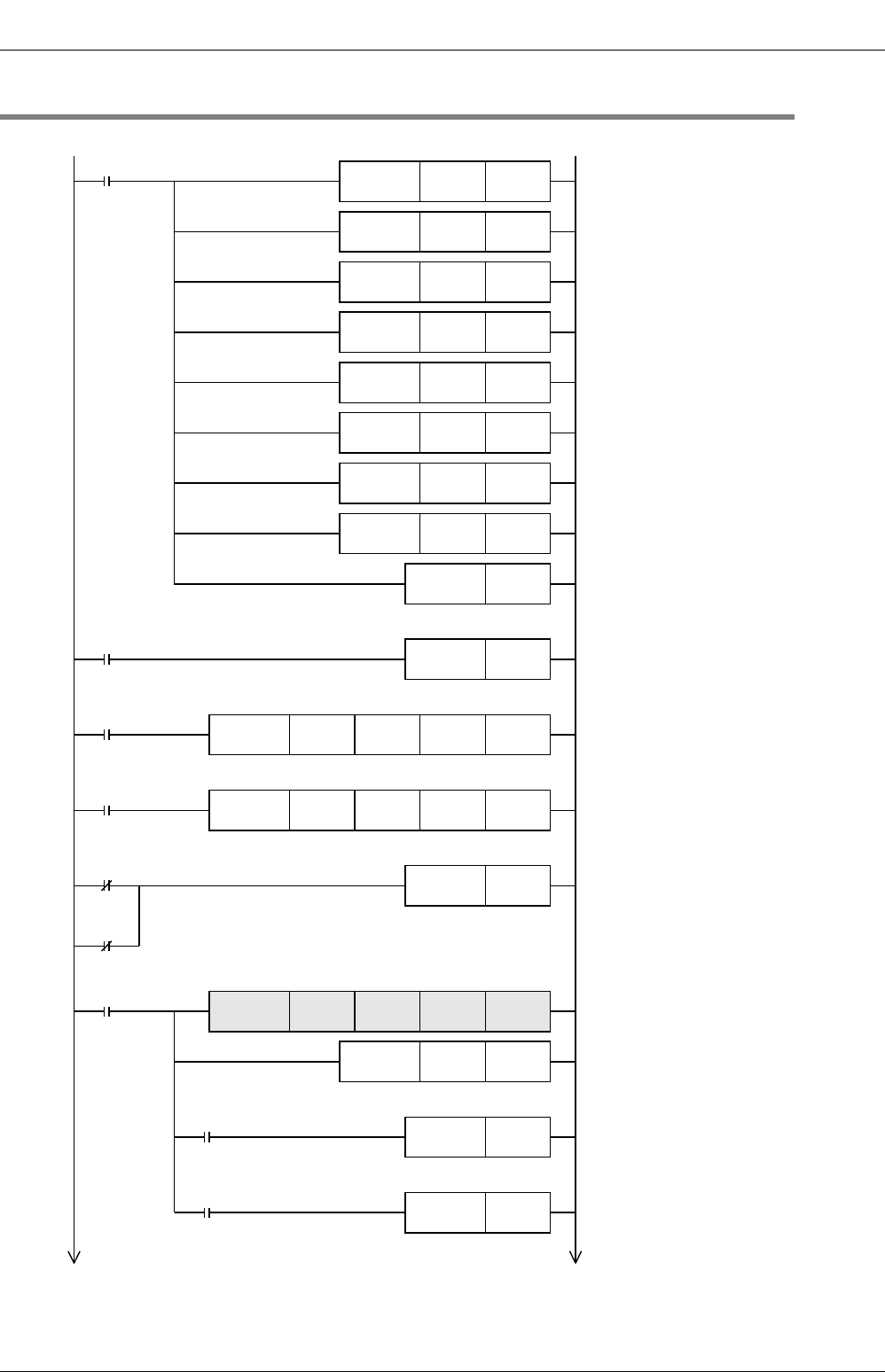
5.3 Program example of auto-tuning (step response method)
5.3 Program example of auto-tuning (step response method)
X010
K500 D500
Auto-tuning is started.
The target value is set (to 50°C).
K1800 D502
The input filter constant (
α
) is set
(to 70%).
K3000 D510
The output value upper limit is set
(to ON for 2 sec).
H0031 D511
The output value lower limit is set
(to ON for 0 sec).
K 70 D512
M0
Auto-tuning is started.
PLS M0
Auto-tuning is started.
SET M1
M8002
Initial pulse
K 0 K 0 H3303 K 1
M8000
RUN monitor
K 0 K 10 D501 K 1
RST D502
M1
PID
operation
D500 D501 D510 D502
The differential gain (K
D
) is set
(to 0%).
Auto-tuning operation is
confirmed.
The sampling time (Ts) is set
(to 3 sec).
Operation setting (ACT)
Auto-tuning is started.
The output value for auto-tuning is
set (to ON for 1.8 sec).
The mode of FX
2N
-4AD-TC is set.
Ch 1: Unused
Ch 3: Unused
Ch 2: K type Ch 4: Unused
PID instruction operation
K 0 D515
K2000 D532
K 0 D533
Data is read from the channel 2
in FX
2N
-4AD-TC.
X010
Auto-tuning is started.
The PID output is initialized.
PID instruction
M1
PID
operation
D511 K2M10
PLF M2
Auto-tuning is finished.
M14
Auto-tuning ON flag
RST M1
Auto-tuning is completed.
M2
Auto-tuning is finished.
FNC 12
MOVP
FNC 12
MOV
FNC 12
MOVP
FNC 12
MOVP
FNC 12
MOVP
FNC 12
MOVP
FNC 12
MOVP
FNC 12
MOVP
FNC 79
TO
FNC 78
FROM
FNC 88
PID
FNC 12
MOV