



















M-20
4 Auto-Tuning
FX
3G
/FX
3U
/FX
3UC
PLC User's Manual - Analog Control Edition
PID Instruction (FNC 88)
4.1 Limit Cycle Method
-
τ
τ
τ
on
on
1
50
×
4.1.3 Reference: How to obtain three constants in PID control (limit cycle method)
For acquiring satisfactory control results in PID control, it is necessary to obtain the optimal value of each
constant (parameter) suitable to the control target.
This paragraph explains the limit cycle method to obtain the amplitude (a) and vibration cycle (
τ, τon) of the
input value, and then calculate the proportional gain (K
P), integral time (TI) and differential time (TD) based on
the expressions shown in the table below.
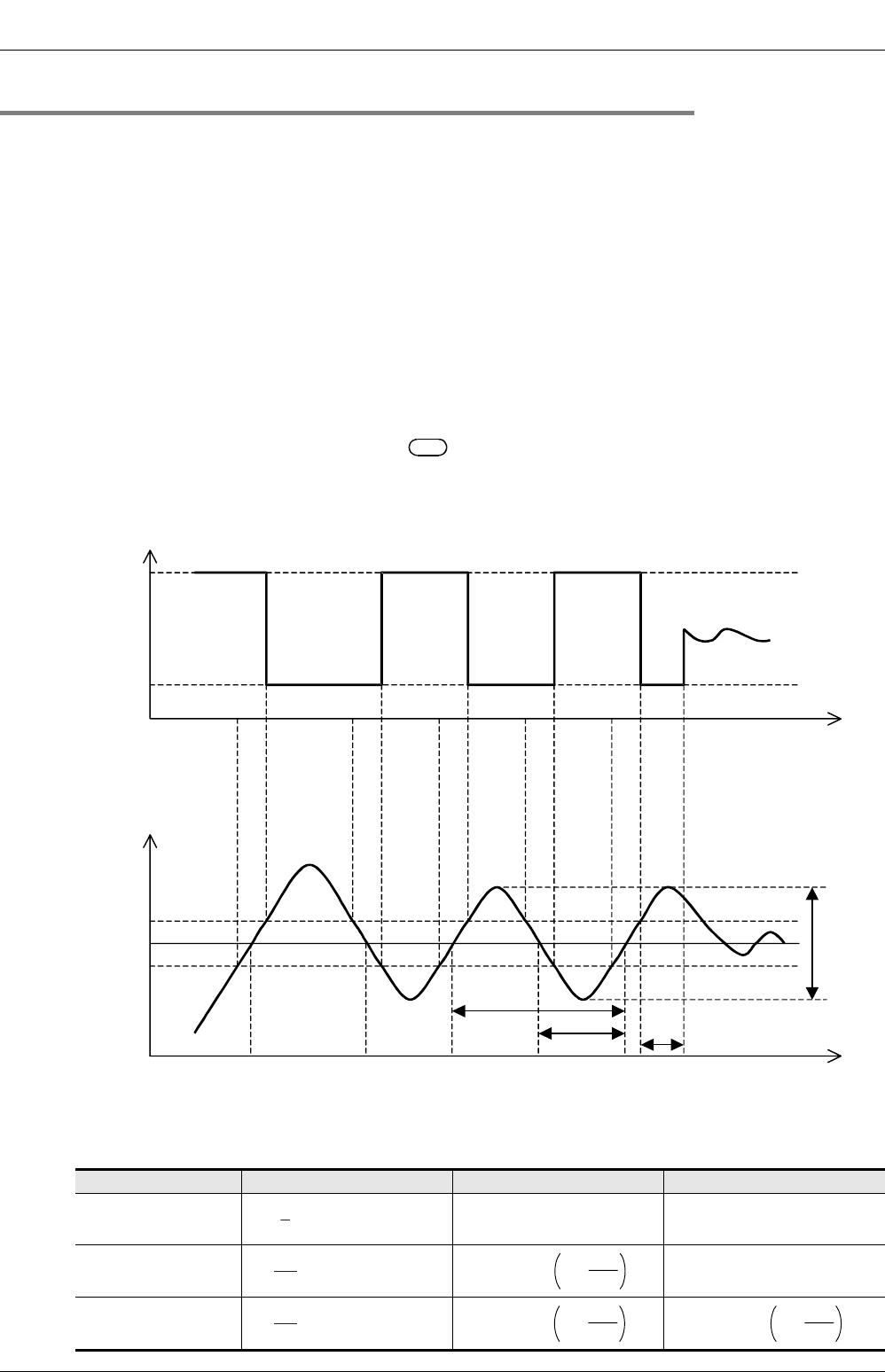
What is the limit cycle method
Changes in the input value in two-position control (in which the output Upper Limit Value (ULV) and output
Lower Limit Value (LLV) are switched according to the deviation) are measured, and then three constants in
the PID control are obtained.
Operation characteristics (in an example of backward operation)
During the "
τw" period after the tuning cycle is finished, the output value is held at the output Lower Limit
Value (LLV), and then normal PID control is started.
The value "
τw" can be obtained by the expression "τw = (50 + Kw)/100 × (τ-τon)", and the wait setting
parameter "Kw" can be set in the parameter +28.
(Setting range: Kw = −50 to +32717[%])
(When the abnormal range is specified, "τw" is handled as "0")
Operation characteristics and three constants
Control type Proportional gain (KP) [%] Integral time (TI) [×100ms] Differential time (TD) [×10ms]
Only proportional
control (P operation)
⎯⎯
PI control
(PI operation)
⎯
PID control
(PID operation)
S
3
Input value
Time(s)
Output value
a
on
SV(target value)
ULV
(Output upper
limit value)
LLV
(Output lower
limit value)
SV+SH
PV
SV-SH
PV
τ
0
w
Time
SH
PV
: PV in
p
ut threshold
(
h
y
steresis
)
τ
1
τ
2
τ
τ
τ
()
LLVULV
a
1
-
×100
()
LLVULV
a
0.9
-
×100
-
τ
τ
τ
on
on
1
33
×
()
LLVULV
a
1.2
-
×100
-
τ
τ
τ
on
on
1
20
×
-
τ
τ
τ
on
on
1
50
×