



















3 - 10
3 Function Specifications
MITSUBISHI CNC
3-2-4 Speed loop PID changeover control
This function is used under full-closed loop control. Normally, machine-end position tracking delays
compared with the motor-end position.
Under full-closed position loop control, machine-end position is used for position feedback. Therefore, the
motor-end position tends to advance too much, which may cause overshooting of the machine-end position.
This function can suppress the generation of overshoot by adding the D (delay) control to the speed control,
which is normally controlled with PI (proportional integral), in order to weaken the PI control after the position
droop becomes 0.
3-2-5 Disturbance torque observer
The effect caused by disturbance, frictional resistance or torsion vibration during cutting can be reduced by
estimating the disturbance torque and compensating it.
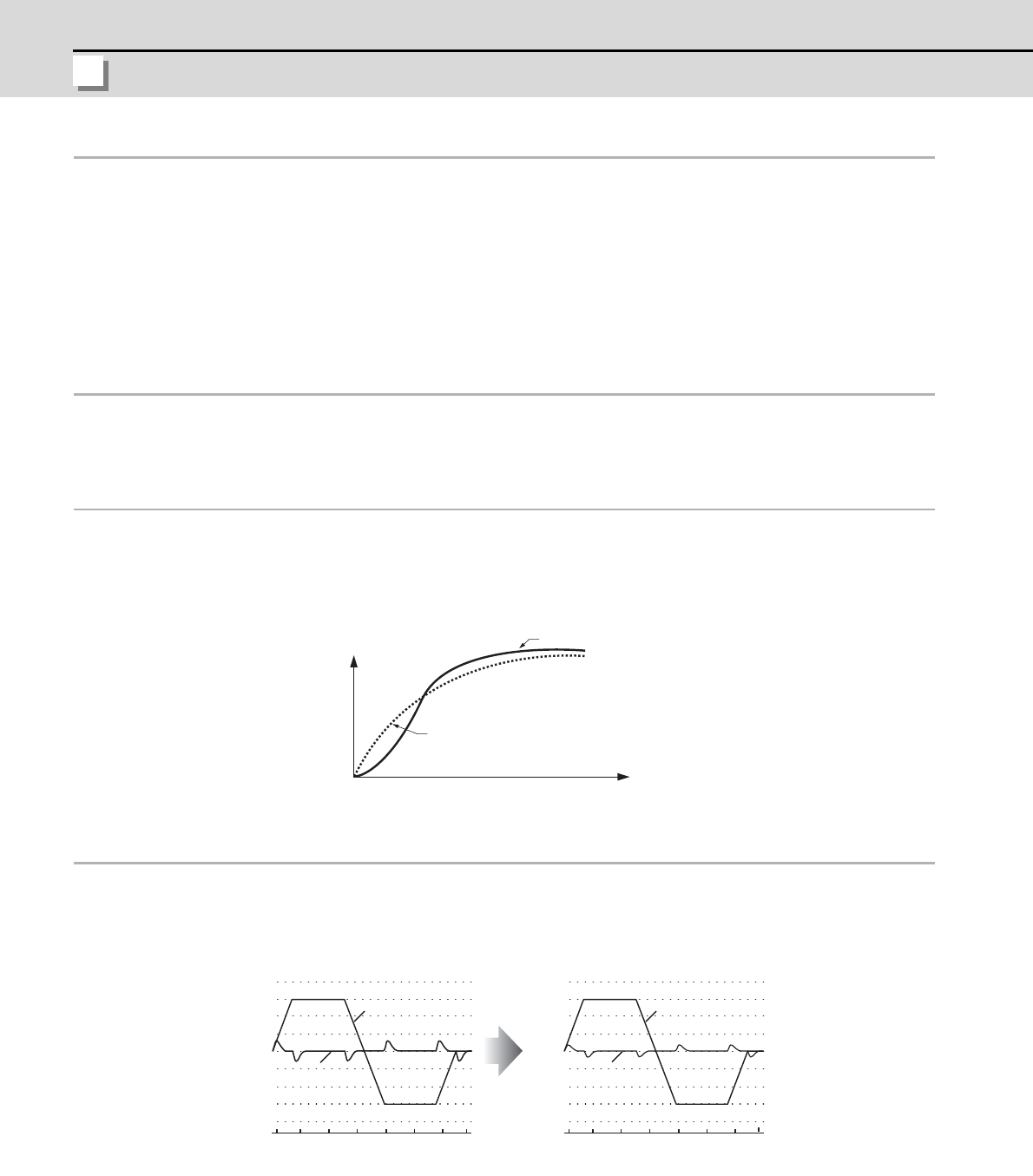
3-2-6 Smooth High Gain control (SHG control)
A high-response control and smooth control (reduced impact on machine) were conventionally conflicting
elements; however, SHG control enables the two elements to function simultaneously by controlling the
motor torque (current FB) with an ideal waveform during acceleration/deceleration.
3-2-7 High-speed synchronous tapping control (OMR-DD control)
Servo drive unit detects the spindle position, and compensates the synchronization errors. This control
enables more accurate tapping than the previous.
SHG control
Speed
Conventional control
Position loop step response
Time
(r/min) (r/min)
Servo/Spindle
synchronous error
(sec) (sec)
Servo/Spindle
synchronous error
With OMR-DD control