



















3 - 13
MDS-D/DH Series Specifications Manual
3-3 Compensation control function
3-3 Compensation control function
3-3-1 Jitter compensation
The load inertia becomes much smaller than usual if the motor position enters the machine backlash when
the motor is stopped.
Because this means that an extremely large VGN1 is set for the load inertia, vibration may occur.
Jitter compensation can suppress the vibration that occurs at the motor stop by ignoring the backlash
amount of speed feedback pulses when the speed feedback polarity changes.
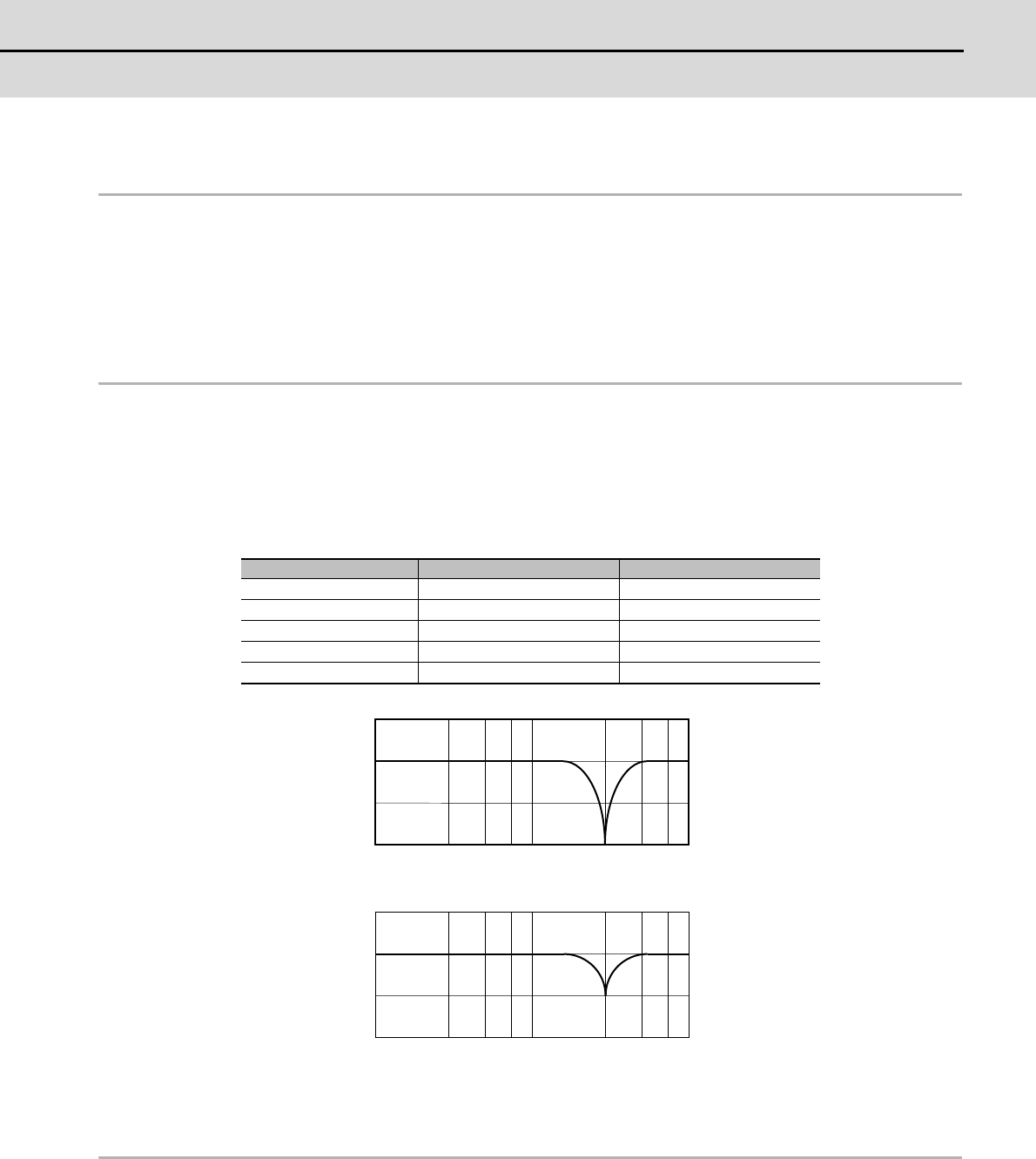
3-3-2 Notch filter
This filter can damp vibrations of servo torque commands at a specified frequency.
Machine vibrations can be suppressed by adjusting the notch filter frequency to the machine's resonance
frequency.
Filter depth adjustment is also available that allows stable control even when the filter is set to an extremely
low frequency.
<Specifications>
3-3-3 Adaptive tracking-type notch filter
Machine's specific resonance frequency tends to change due to aged deterioration or according to
machine's operation conditions. Therefore, the frequency may be deviated from the filter frequency set at the
initial adjustment. With adaptive tracking-type notch filter, resonance point fluctuation due to the machine's
condition change is estimated using the vibration components of the current commands, and effective notch
filter frequency, which has been deviated from the setting value, is automatically corrected to suppress the
resonance.
Notch filter Frequency Depth compensation
Notch filter 1 50Hz to 2250Hz Enabled
Notch filter 2 50Hz to 2250Hz Enabled
Notch filter 3 Fixed at 1125Hz Disabled
Notch filter 4 50Hz to 2250Hz Enabled
Notch filter 5 50Hz to 2250Hz Enabled
+20
-20
-40
0
+20
-20
-40
0
10 30 50 70 100 300 500 700 1k
10 30 50 70 100 300 500 700 1k
Gain
[dB]
Gain
[dB]
Frequency
[Hz]
Frequency
[Hz]
Example of filter characteristic set to 300Hz
For shallow setting by additionally using the depth compensation at 300Hz