


















7 - 5
MDS-D/DH Series Specifications Manual
7-1 Selection of the servomotor
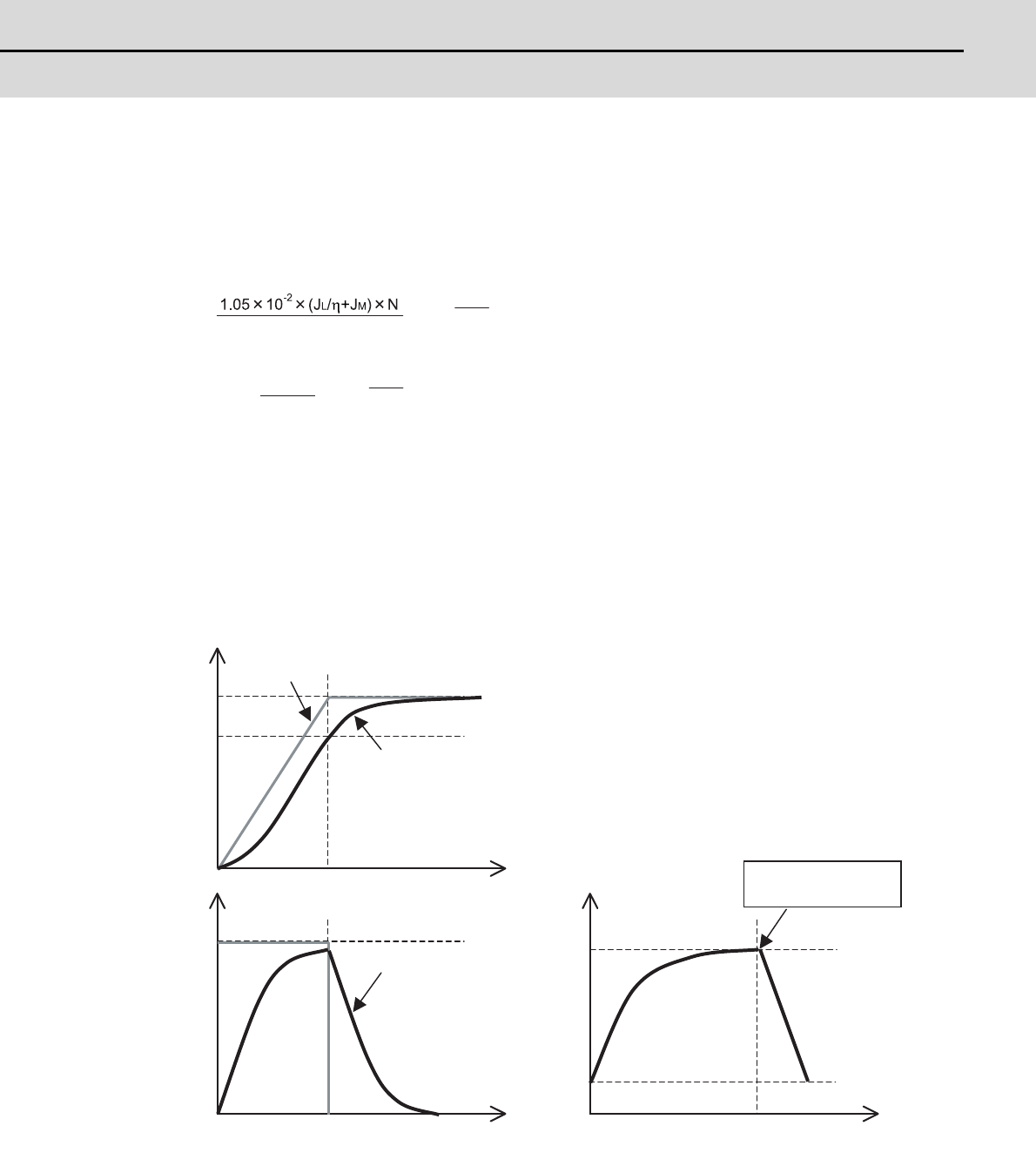
(b) Approximation when using the NC command linear acceleration/deceleration pattern + servo standard
position control
This is a normal command pattern or servo standard position control method.
Using the expression (7-3) and (7-4), approximate the maximum torque "Ta1" and maximum torque
occurrence speed "Nm" required for this acceleration/deceleration pattern.
••• (7-3)
•••(7-4)
Fig.1 Speed, acceleration and torque characteristics when using the NC command linear
acceleration/deceleration pattern + servo standard position control
N : Motor reach speed (r/min)
J
L
: Motor shaft conversion load inertia
(kg•cm
2
)
J
M
: Motor inertia
(kg•cm
2
)
η : Drive system efficiency (Normally 0.8 to 0.95)
T
MAX
: Maximum motor torque (N•m)
T
L
: Motor shaft conversion load (friction, unbalance)
torque
(N•m)
T
a
1 =
ta
(N
.
m)
(1-
e
)+T
L
-Kpta
1000
Nm =N{1-
Kpta
1000
(r/min)
(1-
e
)}
-Kpta
1000
(ms)
(r/min)
0
ta
N
(ms)
0
ta
A
c
Nm
(r/min)
0
Nm
Ta 1
TL
N
Time Motor speed
Motor speed
NC command
Motor actual speed
Motor acceleration
Time
Motor
acceleration
Motor
torque
Speed most required
for the motor torque