



















3 - 14
3 Function Specifications
MITSUBISHI CNC
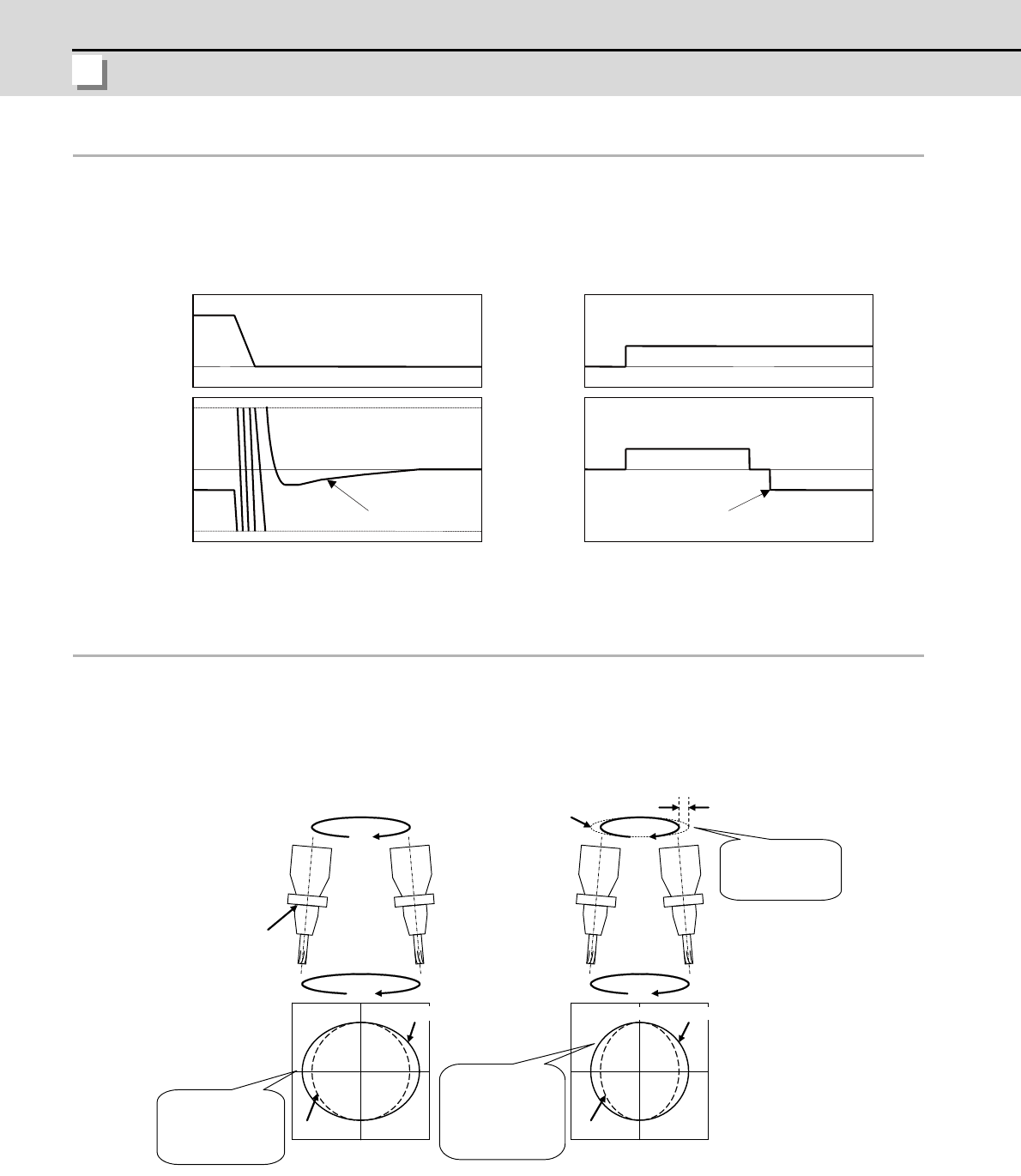
3-3-4 Overshooting compensation
The phenomenon when the machine position goes past or exceeds the command during feed stopping is
called overshooting.
In OVS compensation, the overshooting is suppressed by subtracting the torque command set in the
parameters when the motor stops.
3-3-5 Machine end compensation control
The shape of the machine end during high-speed and high-speed acceleration operation is compensated by
compensating the spring effect from the machine end to the motor end.
The shape may be fine during low-speed operation. However, at high speeds, the section from the machine
end to the outer sides could swell. This function compensates that phenomenon.
0
0
0
0
Position
command
Position
droop
Time
Overshoo
t
Speed
FB
Position
droop
Time
Overshoot
[1] Overshooting during rapid traverse settling [2] Overshooting during pulse feed
Compensation
Electric end FB
Machine end FB
Electric end FB
Normal control
Machine end FB
Machine end compensation
Electric end FB
Machine end FB
Spindle head
Program path
Command is issued
in the inner side
during high-speed
feed.
During high-speed
feed, the machine end
swells outward due to
the spring effect.
Since a command is
issued in the inner side
by the amount of spring
effect, the shape keeps
fine even during the
high-speed feed.