


















MDS-D/DH Series Specifications Manual
4-1 Servomotor
4 - 19
4-1-9 Dynamic brake characteristics
If a servo alarm that cannot control the motor occurs, the dynamic brakes will function to stop the servomotor
regardless of the parameter settings.
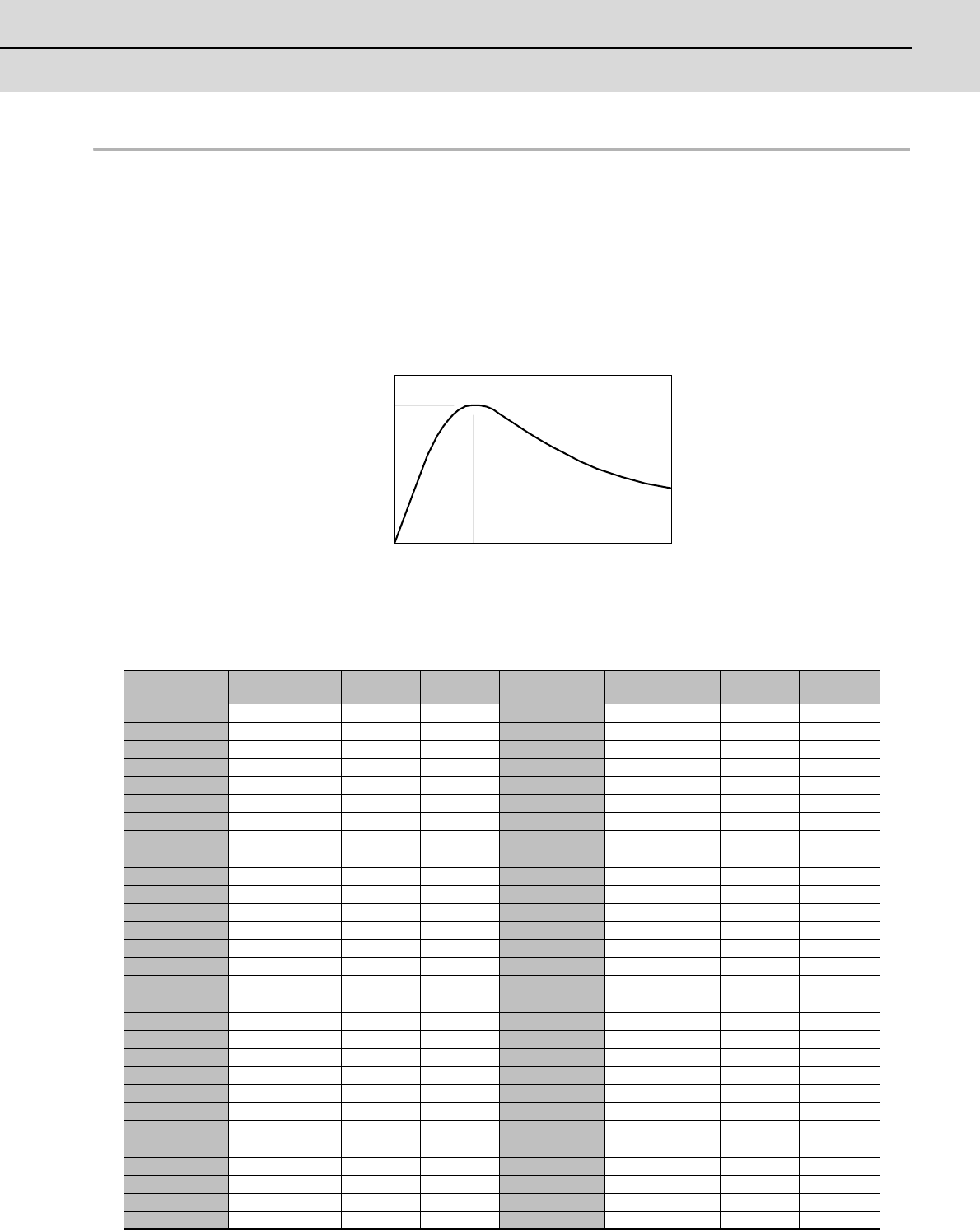
(1) Deceleration torque
The dynamic brake uses the motor as a generator, and obtains the deceleration torque by consuming that
energy with the dynamic brake resistance. The characteristics of this deceleration torque have a maximum
deceleration torque (Tdp) regarding the motor speed as shown in the following drawing. The torque for each
motor is shown in the following table.
Max. deceleration torque of a dynamic brake
Motor type
(200V series)
Stall torque
(N•m)
Tdp
(N•m)
Ndp
(r/min)
Motor type
(400V series)
Stall torque
(N•m)
Tdp
(N•m)
Ndp
(r/min)
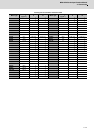
HF75 2.0 5.43 1825 HF-H75 2.0 5.11 1685
HF105 3.0 10.21 1967 HF-H105 3.0 10.19 1740
HF54 2.9 3.96 758 HF-H54 2.9 3.96 690
HF104 5.9 10.02 1060 HF-H104 5.9 10.04 897
HF154 9.0 15.65 1356 HF-H154 9.0 15.04 1073
HF224 12.0 20.06 1765 HF-H204 13.7 15.83 835
HF204 13.7 15.97 1029 HF-H354 22.5 37.35 657
HF354 22.5 35.28 908 HF-H453 37.2 52.90 619
HF123 7.0 9.79 750 HF-H703 49.0 71.79 374
HF223 12.0 19.95 1059 HF-H903 58.8 89.57 1044
HF303 22.5 30.43 955 HP-H54 3.0 6.32 614
HF453 37.2 53.01 1080 HP-H104 5.9 11.10 824
HF703 49.0 71.93 1070 HP-H154 9.0 18.08 1107
HF903 58.8 89.23 3755 HP-H224 12.0 28.65 1445
HF142 11.0 14.43 547 HP-H204 13.7 28.04 1524
HF302 20.0 29.42 635 HP-H354 22.5 37.93 861
HP54 3.0 6.36 716 HP-H454 31.9 60.58 939
HP104 5.9 11.10 987 HP-H704 49.0 95.47 597
HP154 9.0 17.41 1307 HP-H903 70.0 100.47 936
HP224 12.0 28.74 1848 HP-H1103 110.0 170.39 704
HP204 13.7 26.16 2135 HC-H1502S-S10 146.0 237.80 1828
HP354 22.5 38.44 2072
HP454 31.9 61.60 1597
HP704 49.0 88.38 1656
HP903 70.0 91.73 2984
HP1103 110.0 158.09 2324
HF-KP23 0.64 1.04 1272
HF-KP43 1.3 2.60 1377
HF-KP73 2.4 2.96 962
T
dp
N
dp
0
Motor speed
Deceleration
torque
Deceleration torque characteristics of a dynamic brake