



















3 - 21
MDS-D/DH Series Specifications Manual
3-6 Diagnosis function
(2) Output data settings
(Standard output)
【#2261】 SV061 DA1NO D/A output ch1 data No.
Input the data number you wish to output to the D/A output channel 1.
When using the 2-axis drive unit, set "-1" to the axis that the data will not be output.
---Setting range---
-1 to 127
【#2262】 SV062 DA2NO D/A output ch2 data No.
Input the data number you wish to output to the D/A output channel 2.
When using the 2-axis drive unit, set "-1" to the axis that the data will not be output.
---Setting range---
-1 to 127
(Note) The estimated load inertia ratio (unit: 100%/V) is applied for the rotary motor, and the moving
sections gross weight (unit: 100kg/V) for the linear motor.
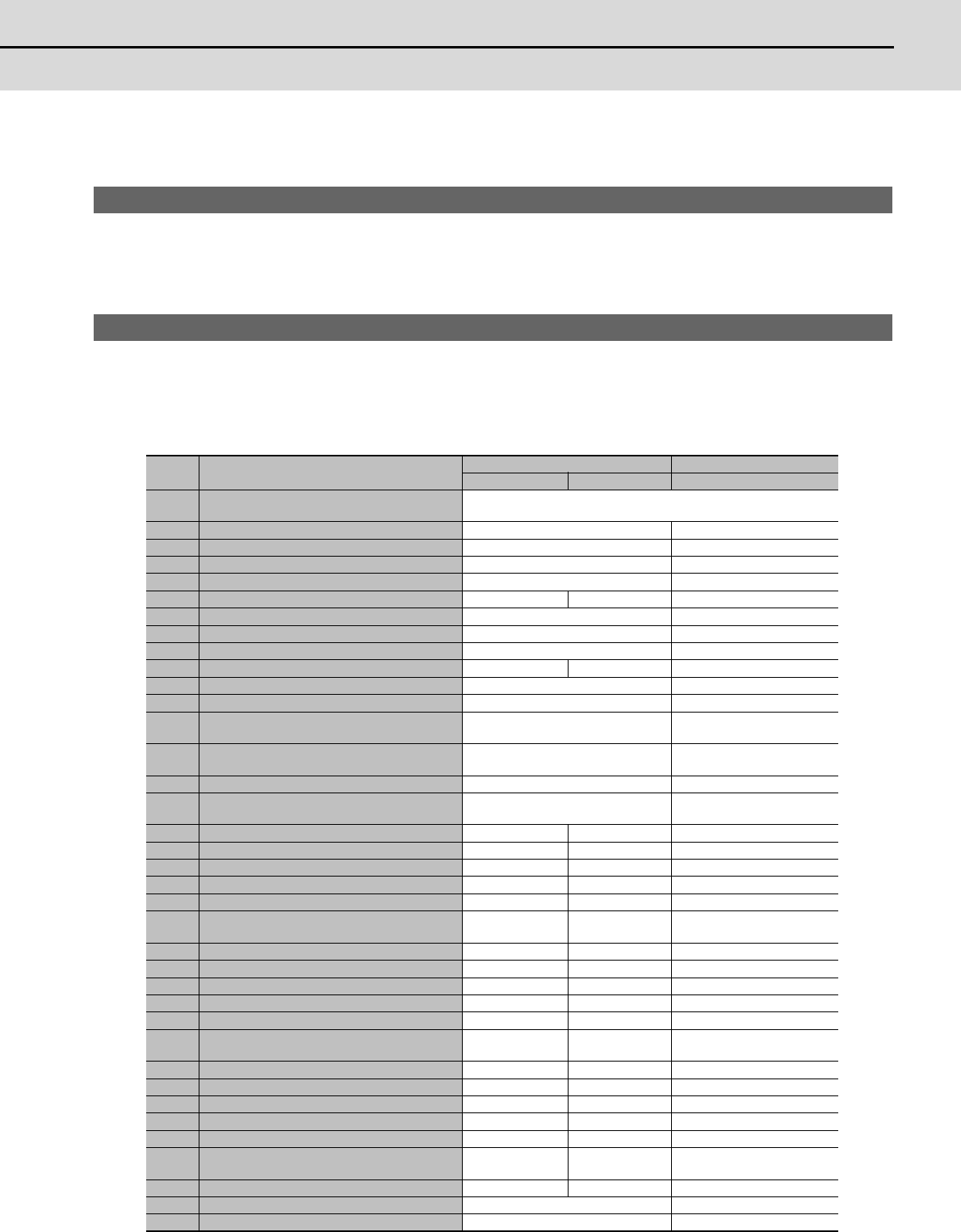
No. Output data
Standard output unit Output cycle
Linear axis Rotary axis
-1 D/A output not selected
For 2-axis drive unit (MDS-D/DH-V2).
Set the parameters to another axis in the drive unit that is not D/A output.
0 Commanded rotation speed 1000(r/min)/V 0.8ms
1 Motor rotation speed 1000(r/min)/V 0.8ms
2 Torque command Motor stall rated ratio 100%/V 0.8ms
3 Torque feedback Motor stall rated ratio 100%/V 0.8ms
6 Effective current command 100%/V 0.8ms
7 Effective current feedback 100%/V 0.8ms
8 Machine vibration frequency 500Hz/V 0.8ms
9 HAS control droop cancel amount 1mm/V 1°/V 0.8ms
30 Collision detection estimated torque 100%/V 0.8ms
31
Collision detection disturbance estimated
torque
100%/V 0.8ms
32
Estimated load inertia ratio
or moving sections gross weight
100%/V or 100kg/V (Note) 0.8ms
35
Disturbance observer estimated disturbance
torque
100%/V 0.8ms
50 Position droop 1μm/V 1/1000°/V 0.8ms
51 Position command 1μm/V 1/1000°/V 0.8ms
52 Position feedback 1μm/V 1/1000°/V 0.8ms
53 Position FΔT 1μm/s/V 1/1000°/s/V 0.8ms
54
Deviation from ideal position
(considering servo tracking delay)
1μm/V 1/1000°/V 0.8ms
60 Position droop 1mm/V 1°/V 0.8ms
61 Position command 1mm/V 1°/V 0.8ms
62 Position feedback 1mm/V 1°/V 0.8ms
63 Position FΔT 1mm/s/V 1°/s/V 0.8ms
64
Deviation from ideal position
(considering servo tracking delay)
1mm/V 1°/V 0.8ms
70 Position droop 1m/V 1000°/V 0.8ms
71 Position command 1m/V 1000°/V 0.8ms
72 Position feedback 1m/V 1000°/V 0.8ms
73 Position FΔT 1m/s/V 1000°/s/V 0.8ms
74
Deviation from ideal position
(considering servo tracking delay)
1m/V 1000°/V 0.8ms
126 Saw tooth wave 0V to 5V 0.8ms
127 2.5V test data 2.5V 0.8ms