



















Emerson Process Management GmbH & Co. OHG 9-39
X-STREAM XE
Instruction Manual
HASXEE-IM-HS
04/2010
9
Modbus Commands
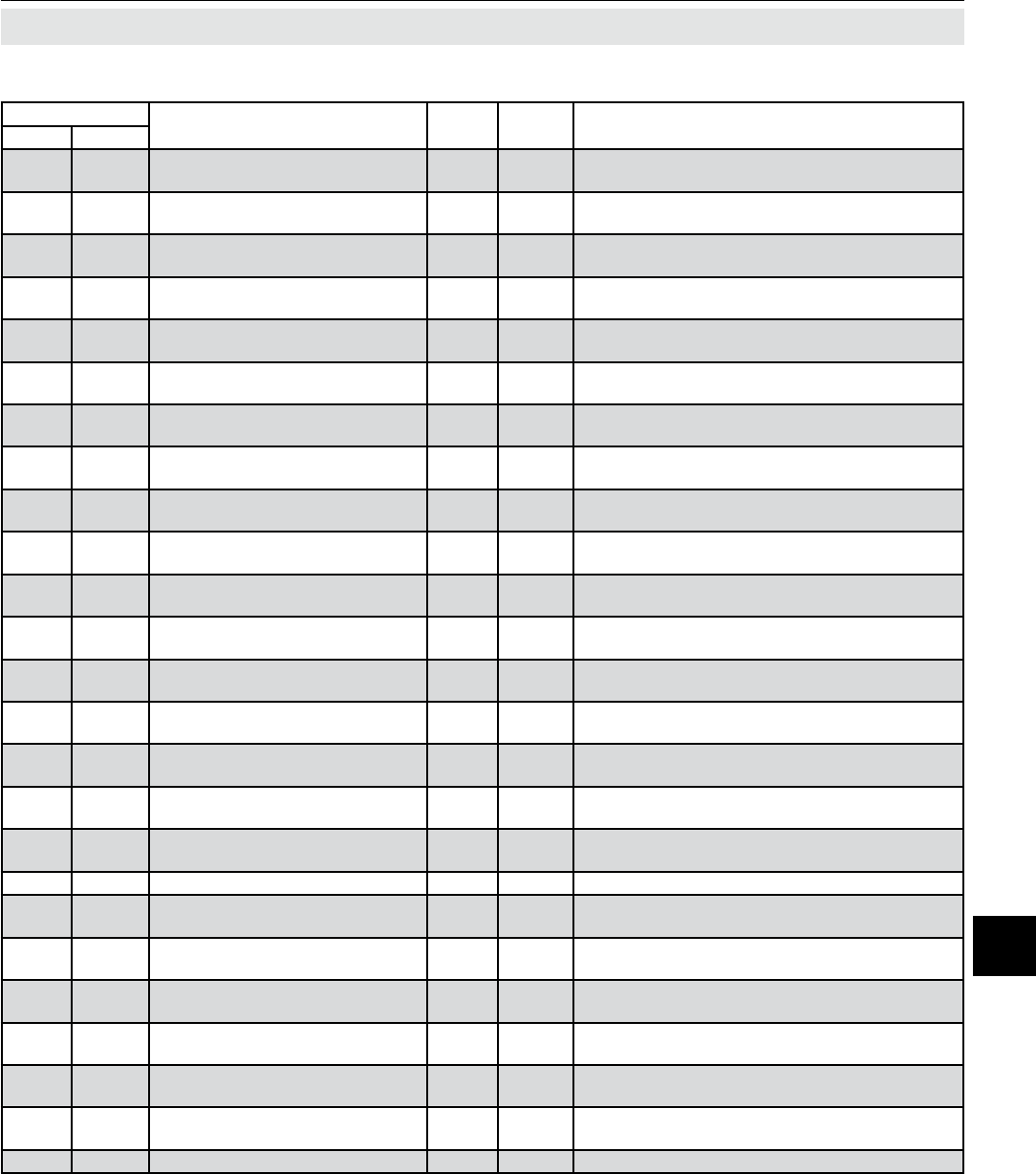
9.4 List of Parameters and Registers - Sorted by Daniel Registers
Address
Tag Name
Data
Type
Client
Access
Description
Daniel Modicon
3509 3509 Service.Measurement.Lin.Method4 Word R/W
Linearization method of comp4 (0=Splines, 1=Po-
lynom)
3510 3510 Service.Measurement.Lin.Method5 Word R/W
Linearization method of comp5 (0=Splines, 1=Po-
lynom)
3511 3511
Service.Measurement.Lin.Start-
Function1
Word R/W
LinFct c1: 1=On/Off, 2=Calc, 3=ToUSB, 4=Fro-
mUSB, 5=Install, 6=ToFile
3512 3512
Service.Measurement.Lin.Start-
Function2
Word R/W
LinFct c2: 1=On/Off, 2=Calc, 3=ToUSB, 4=Fro-
mUSB, 5=Install, 6=ToFile
3513 3513
Service.Measurement.Lin.Start-
Function3
Word R/W
LinFct c3: 1=On/Off, 2=Calc, 3=ToUSB, 4=Fro-
mUSB, 5=Install, 6=ToFile
3514 3514
Service.Measurement.Lin.Start-
Function4
Word R/W
LinFct c4: 1=On/Off, 2=Calc, 3=ToUSB, 4=Fro-
mUSB, 5=Install, 6=ToFile
3515 3515
Service.Measurement.Lin.Start-
Function5
Word R/W
LinFct c5: 1=On/Off, 2=Calc, 3=ToUSB, 4=Fro-
mUSB, 5=Install, 6=ToFile
3516 3516
Service.Measurement.Lin.Lineari-
zerStatus1
Word RO
Lin, status comp1 (0=Normal, 1=Underow,
2=Overow, 3=Undened)
3517 3517
Service.Measurement.Lin.Lineari-
zerStatus2
Word RO
Lin, status comp2 (0=Normal, 1=Underow,
2=Overow, 3=Undened)
3518 3518
Service.Measurement.Lin.Lineari-
zerStatus3
Word RO
Lin, status comp3 (0=Normal, 1=Underow,
2=Overow, 3=Undened)
3519 3519
Service.Measurement.Lin.Lineari-
zerStatus4
Word RO
Lin, status comp4 (0=Normal, 1=Underow,
2=Overow, 3=Undened)
3520 3520
Service.Measurement.Lin.Lineari-
zerStatus5
Word RO
Lin, status comp5 (0=Normal, 1=Underow,
2=Overow, 3=Undened)
3521 3521
Service.Measurement.Lin.Itera-
tions1
Word RO Lin-computing iteration steps of comp1
3522 3522
Service.Measurement.Lin.Itera-
tions2
Word
RO Lin-computing iteration steps of comp1
3523 3523
Service.Measurement.Lin.Itera-
tions3
Word RO Lin-computing iteration steps of comp1
3524 3524
Service.Measurement.Lin.Itera-
tions4
Word RO Lin-computing iteration steps of comp1
3525 3525
Service.Measurement.Lin.Itera-
tions5
Word RO Lin-computing iteration steps of comp1
4001 4001 Status.NamurStates.NamurAlarm Word RO NAMUR sum state bit-eld (b0:F b1:M b2:S b3:C)
4002 4002
Status.NamurStates.NamurAlarm-
Device
Word RO
device‘s NAMUR state bit-eld (b0:F b1:M b2:S
b3:C)
4003 4003
Status.NamurStates.NamurA-
larmCh1
Word RO
comp1‘s NAMUR state bit-eld (b0:F b1:M b2:S
b3:C)
4004 4004
Status.NamurStates.NamurA-
larmCh2
Word RO
comp2‘s NAMUR state bit-eld (b0:F b1:M b2:S
b3:C)
4005 4005
Status.NamurStates.NamurA-
larmCh3
Word RO
comp3‘s NAMUR state bit-eld (b0:F b1:M b2:S
b3:C)
4006 4006
Status.NamurStates.NamurA-
larmCh4
Word RO
comp4‘s NAMUR state bit-eld (b0:F b1:M b2:S
b3:C)
4007 4007
Status.NamurStates.NamurA-
larmCh5
Word RO
comp4‘s NAMUR state bit-eld (b0:F b1:M b2:S
b3:C)
4026 4026 Info.SensorVersion Word RO Version number of sensor rmware