



















Closed Loop Speed Mode
128 AX2500/2850 Motor Controller User’s Manual Version 1.7. February 1, 2005
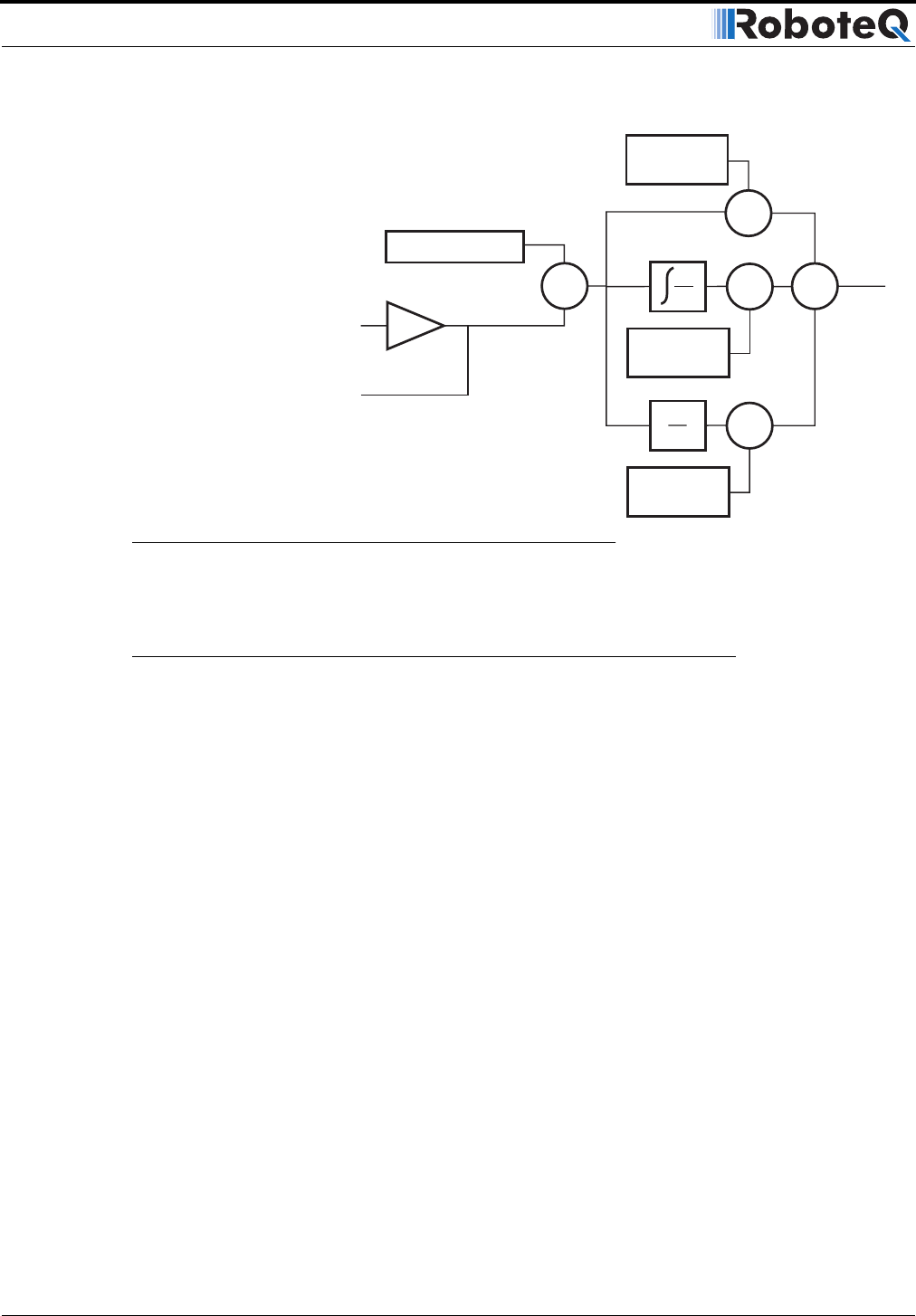
PID tuning in Speed Mode
As discussed above, three parameters - Proportional Gain Integral Gain, and Differential
Gain - can be adjusted to tune the Closed Loop Speed control algorithm. The ultimate goal
in a well tuned PID is a motor that reaches the desired speed quickly without overshoot or
oscillation.
Because many mechanical parameters, such as motor power, gear ratio, load and inertia
are difficult to model, tuning the PID is essentially a manual process that takes experimen-
tation.
The Roborun PC utility makes this experimentation easy by providing a screen for changing
the Proportional, Integral and Differential gains and another screen for running and monitor-
ing the motors. Run first the motor with the preset values. Then experiment different val-
ues until a satisfactory behavior is found.
In Speed Mode, the Integral component of the PID is the most important and must be set
first. The Proportional and Differential component will help improve the response time and
loop stability.
In case where the load moved by the motor is not fixed, you will need to tune the PID with
the minimum expected load and tune it again with the maximum expected load. Then try
to find values that will work in both conditions. If the disparity between minimal and maxi-
mal possible loads is large, it may not be possible to find satisfactory tuning values.
Note that the AX2500/2850 uses one set of Proportional Integral and Differential Gains for
both motors and therefore assumes that similar motors, mechanical assemblies and loads
are present at each channel.
Desired Speed
Differential
Gain
Proportional
Gain
E= Error
Output
Measured Speed
Tachometer
or
Optical Encoder
A/D
-
x
Σ
x
dE
dt
Integral
Gain
x
dE
dt
FIGURE 76. PID algorithm used in Speed mode