



















AX2500/2850 Motor Controller User’s Manual 141
RS232 Communication with the Encoder Module
Encoders do not report an absolute position value but a count that is relative to the
point where the motor shaft was at power up. It is typically necessary to have the
motors moved to a “home” position and reset the counters at that reference point.
RS232 Communication with the Encoder Module
The Encoder Module contains its own Microcontroller and firmware in Flash. The
Encoder’s MCU communicates with the one on the main board of the controller. During
normal operations, the two MCUs exchange information as needed, invisibly to the user.
During a short time, at power up, however, the Encoder’s MCU will send data to the main
serial port.
The sent data is a separate prompt message which:
• Announces the presence of the encoder MCU
• Outputs its software revision and date
• Outputs a code identifying the module’s hardware ID
This information can be visualized by connecting the controller to a PC’s serial port and run-
ning the Hyperterm terminal emulation software. Note that a link to a properly configured
Hyperterm session is automatically installed in the Start menu when installing the Roborun
utility.
The serial port settings are described in “Serial (RS-232) Controls and Operation” on
page 87.
After this information is sent, the Encoder’s MCU will “listen” for approximately 100ms
and will enter the In System Programming mode (ISP) if the letter “Z” is sent to it. While in
the ISP mode, new software can be loaded into the Encoder’s MCU via the controller’s
main serial port.
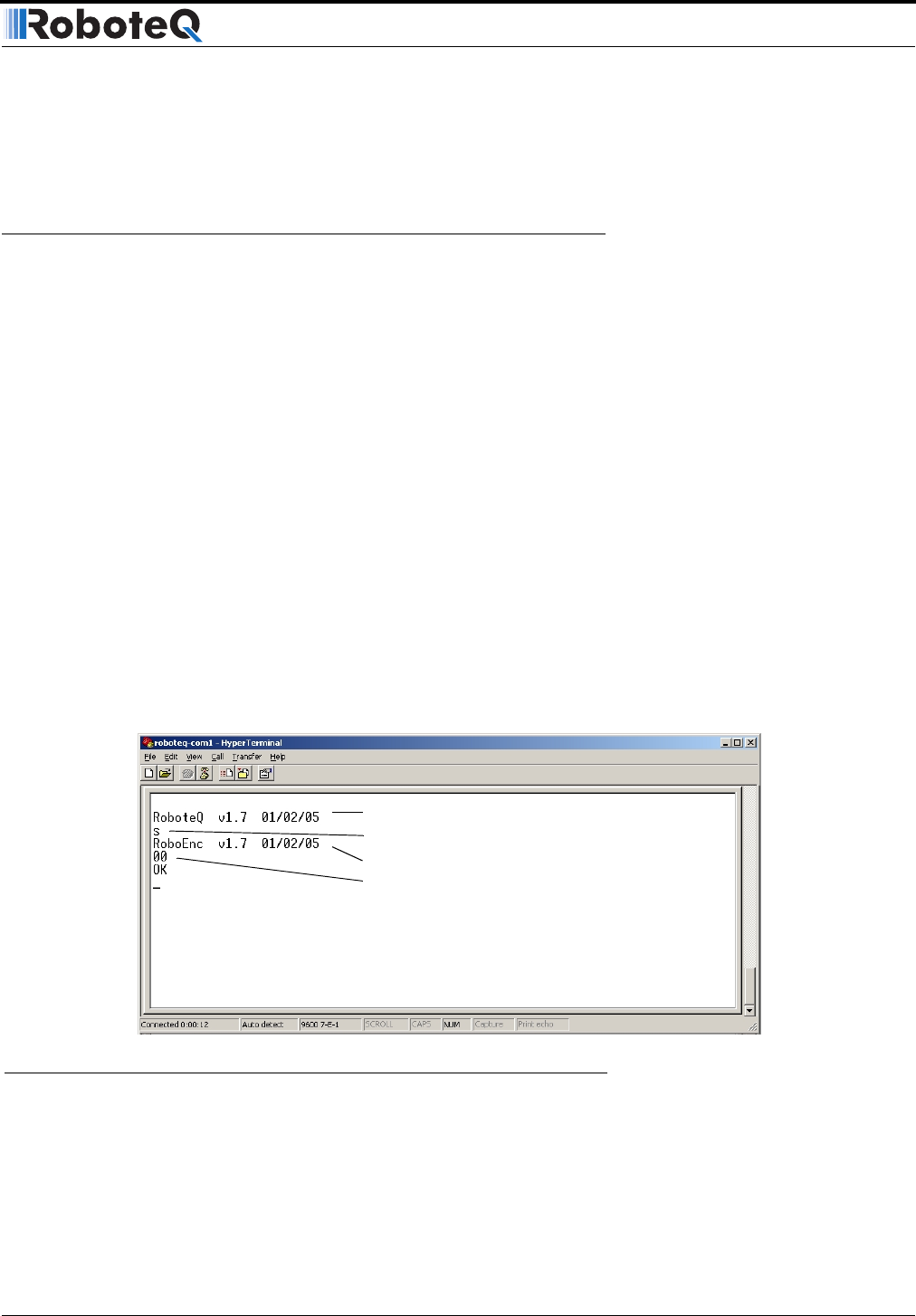
FIGURE 89. Hyperterm session showing power up messages from both MCUs
Power up prompt from main MCU
Power up prompt from encoder MCU
Hardware Code of main board
Hardware Code of Encoder Module