

















AX2500/2850 Motor Controller User’s Manual 99
RS232 Accessible Parameter Table
RS232 Accessible Parameter Table
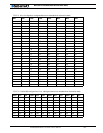
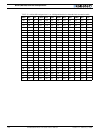
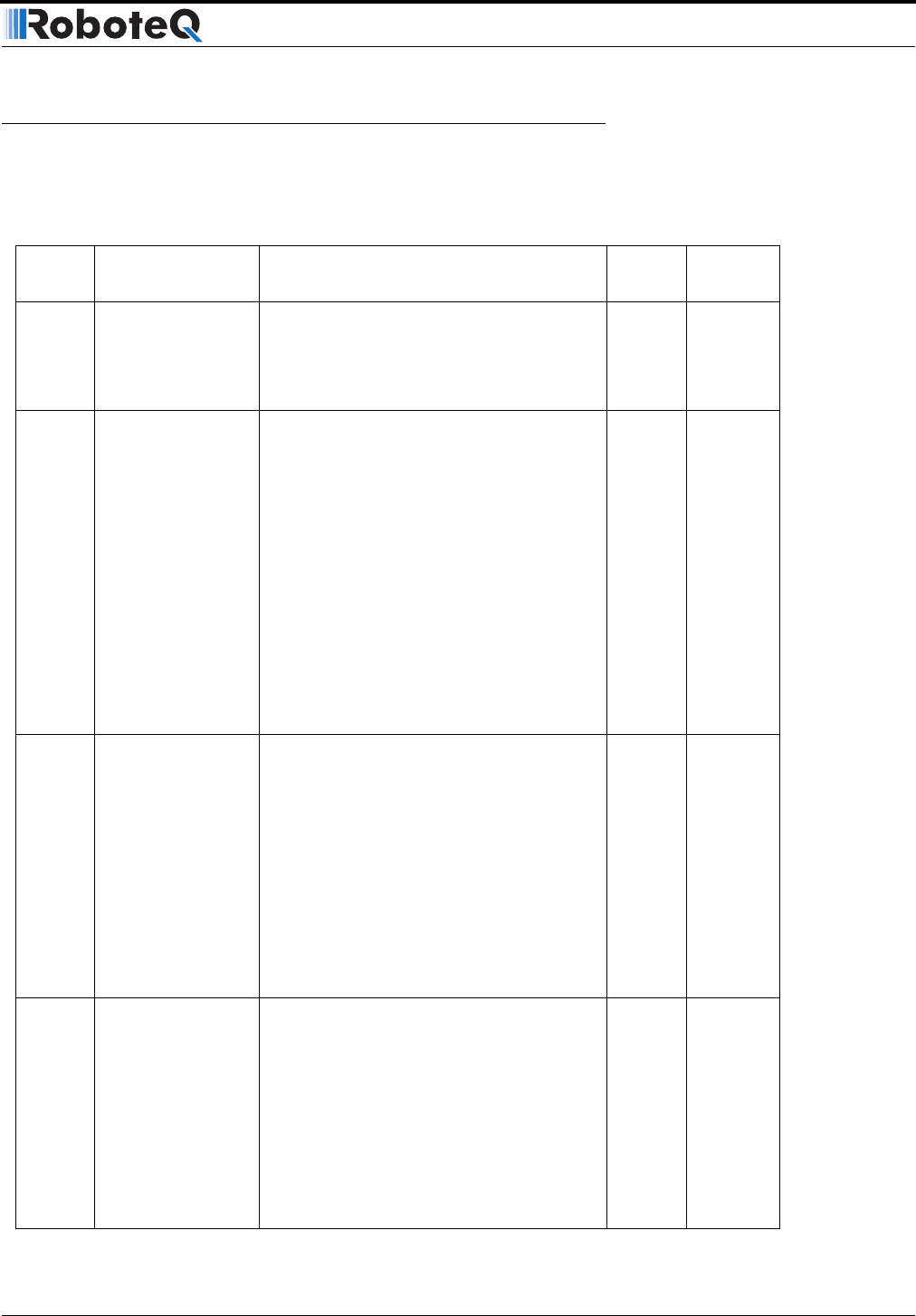
Table 18 below lists the complete set of configuration parameters that may be accessed
and changed using RS232 commands.
TABLE 18. AX2500/2850 Configuration parameters accessible through RS232
Param
nbr Description Allowed Values (default)
Active
after
See
pages
00 Input control mode (0) = R/C Radio mode (default)
1 = RS232, no watchdog
2 = RS232, with watchdog
3 = Analog mode
Reset page 69
page 87
page 107
01 Motor Control
mode
(0) = Separate A, B, speed control, open loop
(default)
1 = Mixed A & B, speed control, open loop
2 = Speed control on A, open loop. Position
control on B
3 = A & B Position control
4 = Separate A, B, speed control, closed loop
5 = Mixed A & B, speed control, closed loop
6 = Speed control on A, closed loop. Position
control on B
Add 128 to use the optical encoder for speed
feedback (AX2850 only)
Reset
or ^FF
page 36
page 115
02 Amps limit 0 = 30A
1 = 45A
2 = 60A
3 = 75A
4 = 90A
(5) = 105A (default)
6 = 120A
Amps may be set with a finer resolution
using the PC utility
Reset
or ^FF
page 38
03 Acceleration 0 = very slow
1 = slow
(2) = medium-slow (default)
3 = medium
4 = fast
5 = fastest
See “Programmable Acceleration” on
page 40 for complete list of acceptable val-
ues
Reset
or ^FF
page 40