



















AX2500/2850 Motor Controller User’s Manual 45
Emergency Stop using External Switch
After and Emergency Stop condition, the controller must be reset or powered Off
and On to resume normal operation.
Emergency Stop using External Switch
An external switch can be added to the AX2500/2850 to allow the operator to stop the con-
troller’s output in case of emergency. This controller input can be configured as the
“Inverted” detection instead of Emergency Stop. The factory default for this input is “No
Action”.
The switch connection is described in “Connecting Switches or Devices to EStop/Invert
Input” on page 56. The switch must be such that it is in the open state in the normal situa-
tion and closed to signal an emergency stop command.
After and Emergency Stop condition, the controller must be reset or powered Off
and On to resume normal operation.
Inverted Operation
For robots that can run upside-down, the controller can be configured to reverse the motor
commands using a gravity activated switch when the robot is flipped. This feature is
enabled only in the mixed mode and when the switch is enabled with the proper configura-
tion of the “Input switch function” parameter. See “Programmable Parameters List” on
page 156.
The switch connection is described in “Connecting Switches or Devices to EStop/Invert
Input” on page 56. The switch must be such that it is in the open state when the robot is in
the normal position and closed when inverted. When the status of the switch has changed,
the controller will wait until the new status has remained stable for 0.5s before acknowl-
edging it and inverting the commands. This delay is to prevent switch activation triggered
by hits and bounces which may cause the controller to erroneously invert the commands.
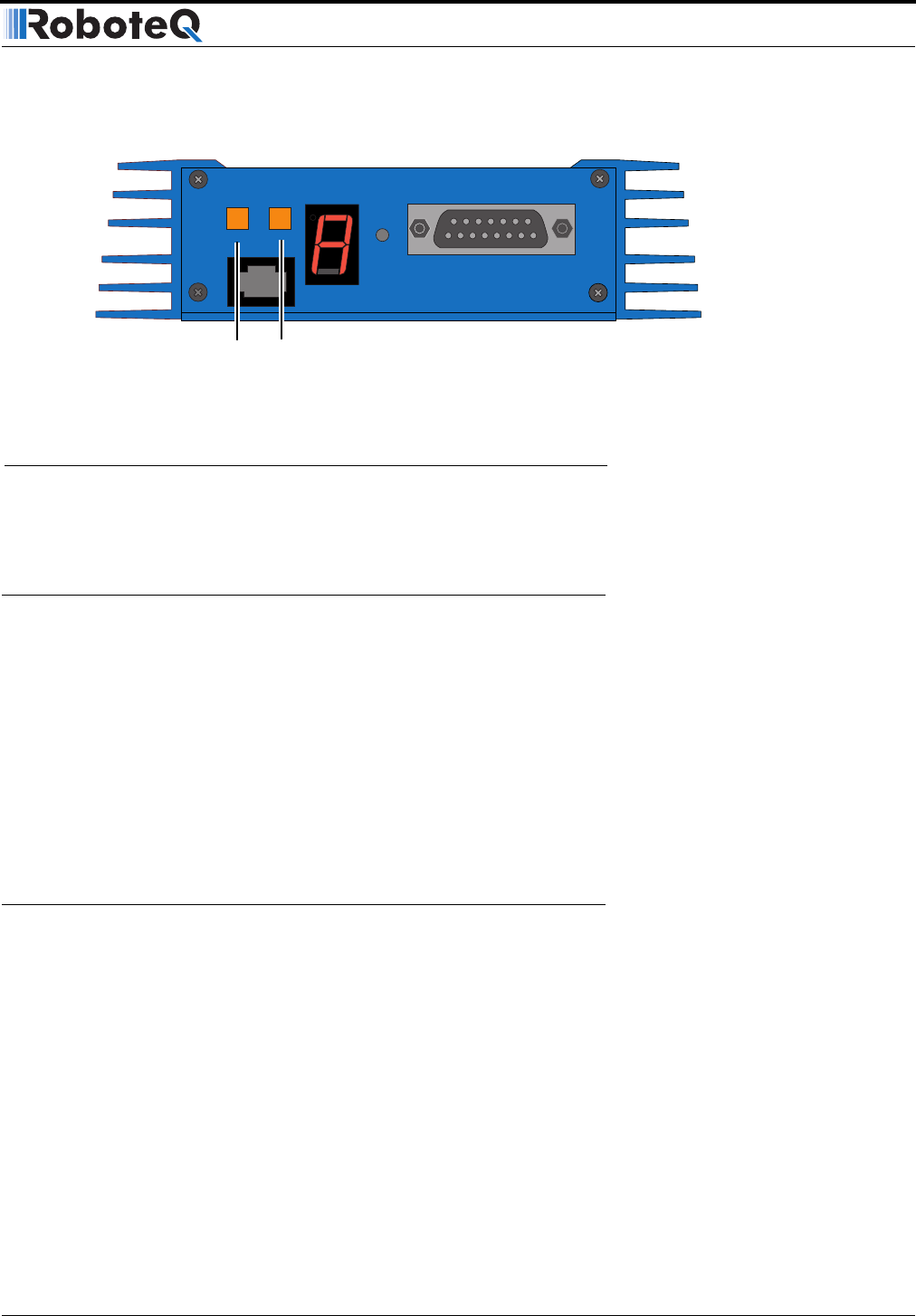
Program Set
Reset
Press the two buttons
simultaneously to cause an
emergency stop
FIGURE 18. Activating an Emergency Stop