



















Using the Roborun Configuration Utility
166 AX2500/2850 Motor Controller User’s Manual Version 1.7. February 1, 2005
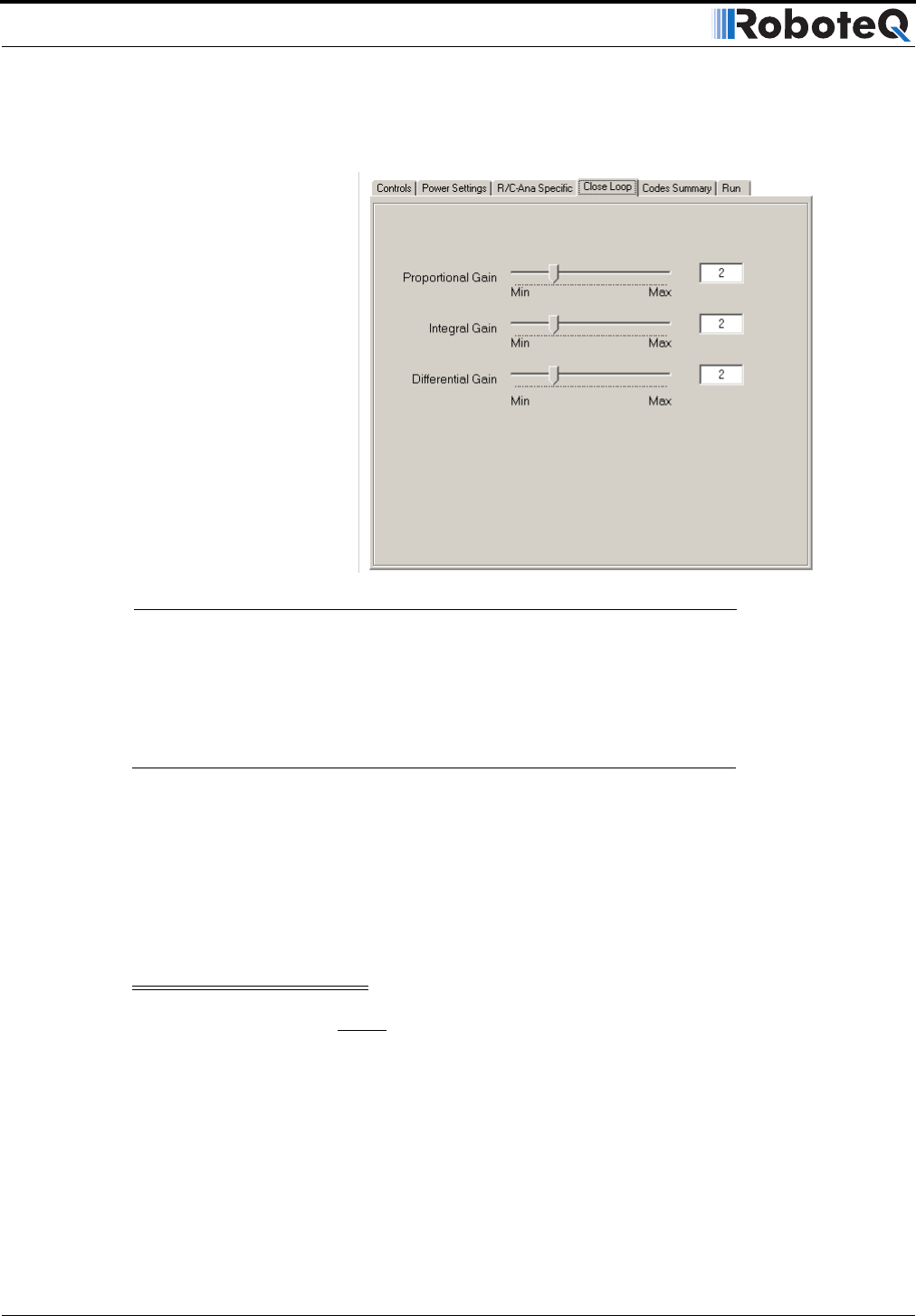
Closed Loop Parameters
This screen shown in Figure 97 is used to set the Proportional, Integral and Differential
gains needed for the PID algorithm. These parameters are used in the Position mode (see
page 115) and the Closed Loop speed mode (see page page 123).
Viewing the Parameters Summary
The summary page will list the command letter and value for each parameter, as defined in
the various parameter setting screens.
It is possible to print this screen and bring it to the controller in order to then quickly and
accurately update the controller’s parameters using the switch and display. See “Program-
ming using built-in Switches and Display” on page 153.
Important Notes:
Most but not all configuration parameters can be updated using the switches.
The print command will automatically use your default printer. No print setup box
will be displayed.
FIGURE 97. Closed Loop parameter setting screen