



















AX2500/2850 Motor Controller User’s Manual 41
Programmable Acceleration
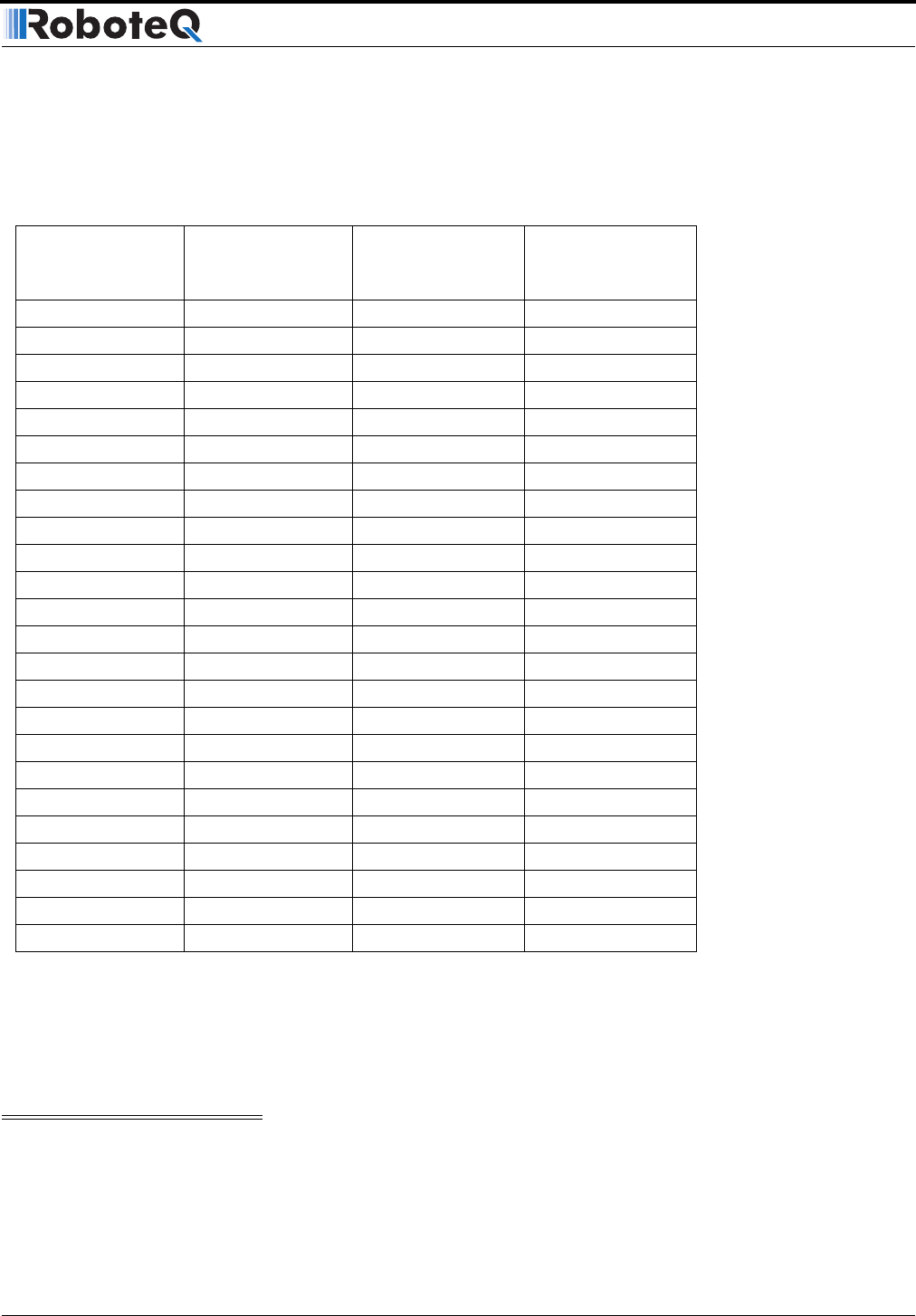
Numerically speaking, each acceleration value corresponds to a fixed percentage speed
increment, applied every 16 milliseconds. The value for each setting is shown in the table
below.
When configuring the acceleration parameter using the Roborun utility, for additional accel-
eration steps can be selected between the six ones selectable using the switch, extending
the slowest acceleration to 2.04 seconds from 0 to max speed. See “Power Settings” on
page 164 for details on how to configure this parameter using Roborun.
Important Warning
Depending on the load’s weight and inertia, a quick acceleration can cause consider-
able current surges from the batteries into the motor. A quick deceleration will cause
an equally large, or possibly larger, regeneration current surge. Always experiment
with the lowest acceleration value first and settle for the slowest acceptable value.
TABLE 8. Acceleration setting table
Acceleration
Setting Using
RS232
Acceleration
Setting Using
Switches
%Acceleration
per 16ms
Time from 0 to
max speed
30 Hex 0.78% 2.05 seconds
20 Hex 1.56% 1.02 seconds
10 Hex 2.34% 0.68 second
00 Hex 0 3.13% 0.51 second
31 Hex 3.91% 0.41 second
21 Hex 4.69% 0.34 second
11 Hex 5.47% 0.29 second
01 Hex 1 6.25% 0.26 second
32 Hex - 7.03% 0.23 second
22 Hex - 7.81% 0.20 second
12 Hex - 8.59% 0.19 second
02 Hex 2 (default) 9.38% 0.17 second
33 Hex - 10.16% 0.16 second
23 Hex - 10.94% 0.15 second
13 Hex - 11.72% 0.14 second
03 Hex 3 12.50% 0.128 second
34 Hex - 13.28% 0.120 second
24 Hex - 14.06% 0.113 second
14 Hex - 14.84% 0.107 second
04 Hex 4 15.63% 0.102 second
35 Hex - 16.41% 0.097 second
25 Hex - 17.19% 0.093 second
15 Hex - 17.97% 0.089 second
05 Hex 5 18.75% 0.085 second