


















6.1 PID Control Instruction (Inexact Differential)
6.1.1 PIDINIT instruction
6-5
6
PID CONTROL
INSTRUCTION
S_PIDINIT
S_PIDINIT
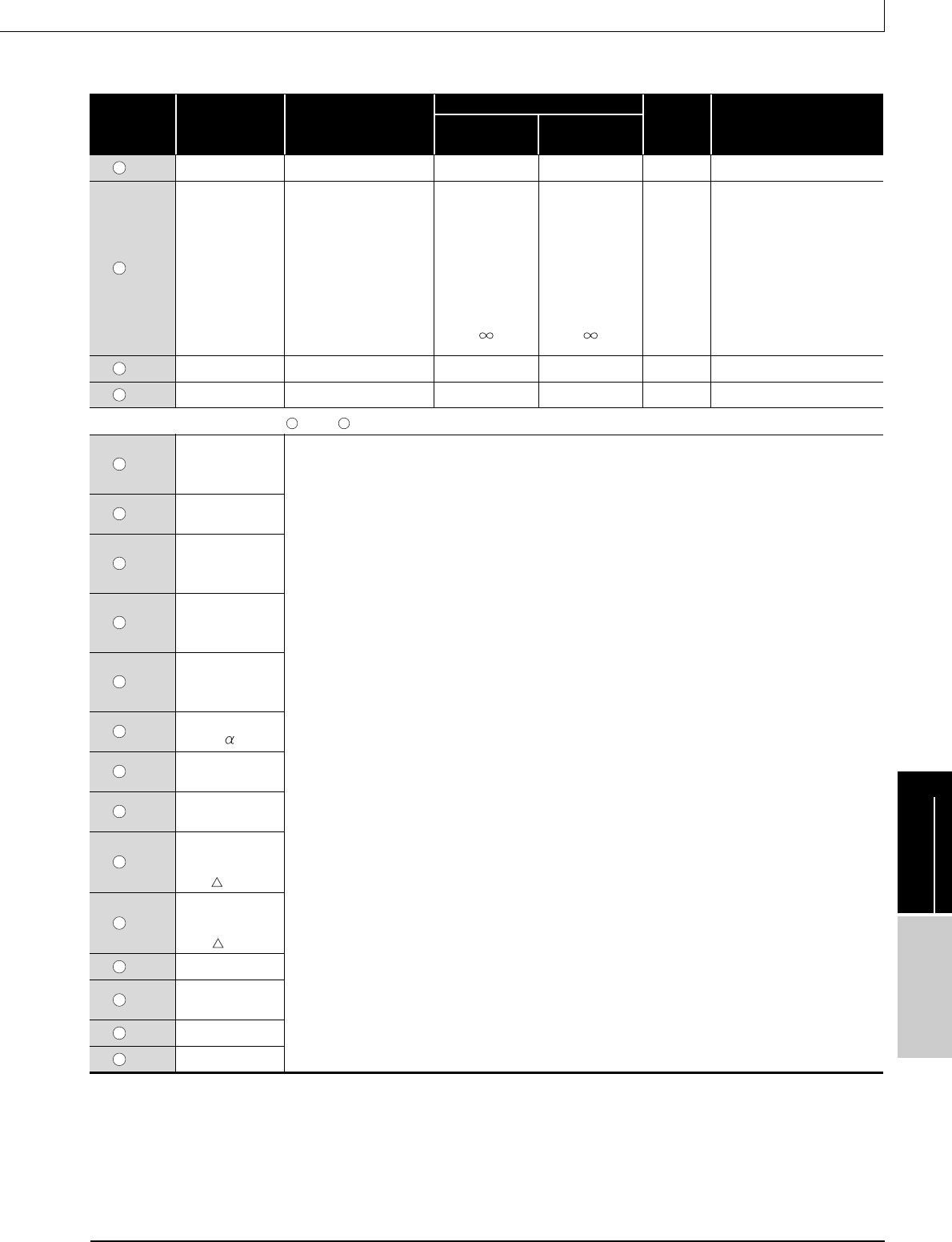
Device Data item Description
Setting range
Setting
side
Processing when the
setting data are outside the
setting range
With PID limits
Without PID
limits
+12
(Fixed value)
–
00User
–
+13
Derivative gain
(K
D)
Set a duration (delay in
action) for derivative
action.
As the setting value
increases, the duration
becomes smaller and
action becomes closer to
exact differential.
Ideal value KD = 8.00
0 to 32767
(unit: 0.01)
If setting value
> 30000
K
D = Infinite
( )
0 to 32767
(unit: 0.01)
If setting value
> 30000
K
D = Infinite
( )
User
An error occurs and the PID
operation for the
corresponding loop is not
performed.
+14
(Fixed value)
–
00User
–
+15
(Fixed value)
–
00User
–
Setting data for No. 2 loop (device: +16 to +29)
+16
Operational
expression
selection
The same as Setting data for No. 1 loop
+17
Sampling cycle
(T
S)
+18
Proportional
constant
(K
P)
+19
Integral
constant
(T
I)
+20
Derivative
constant
(T
D)
+21
Filter coefficient
( )
+22
MV lower limit
(MVLL)
+23
MV upper limit
(MVHL)
+24
MV change rate
limit
( MVL)
+25
PV change rate
limit
( PVL)
+26
(Fixed value)
+27
Derivative gain
(K
D)
+28
(Fixed value)
+29
(Fixed value)
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s