


















6-6
6.1 PID Control Instruction (Inexact Differential)
6.1.1 PIDINIT instruction
S_PIDINIT
m=(n-1) 14+2
n: number of loops
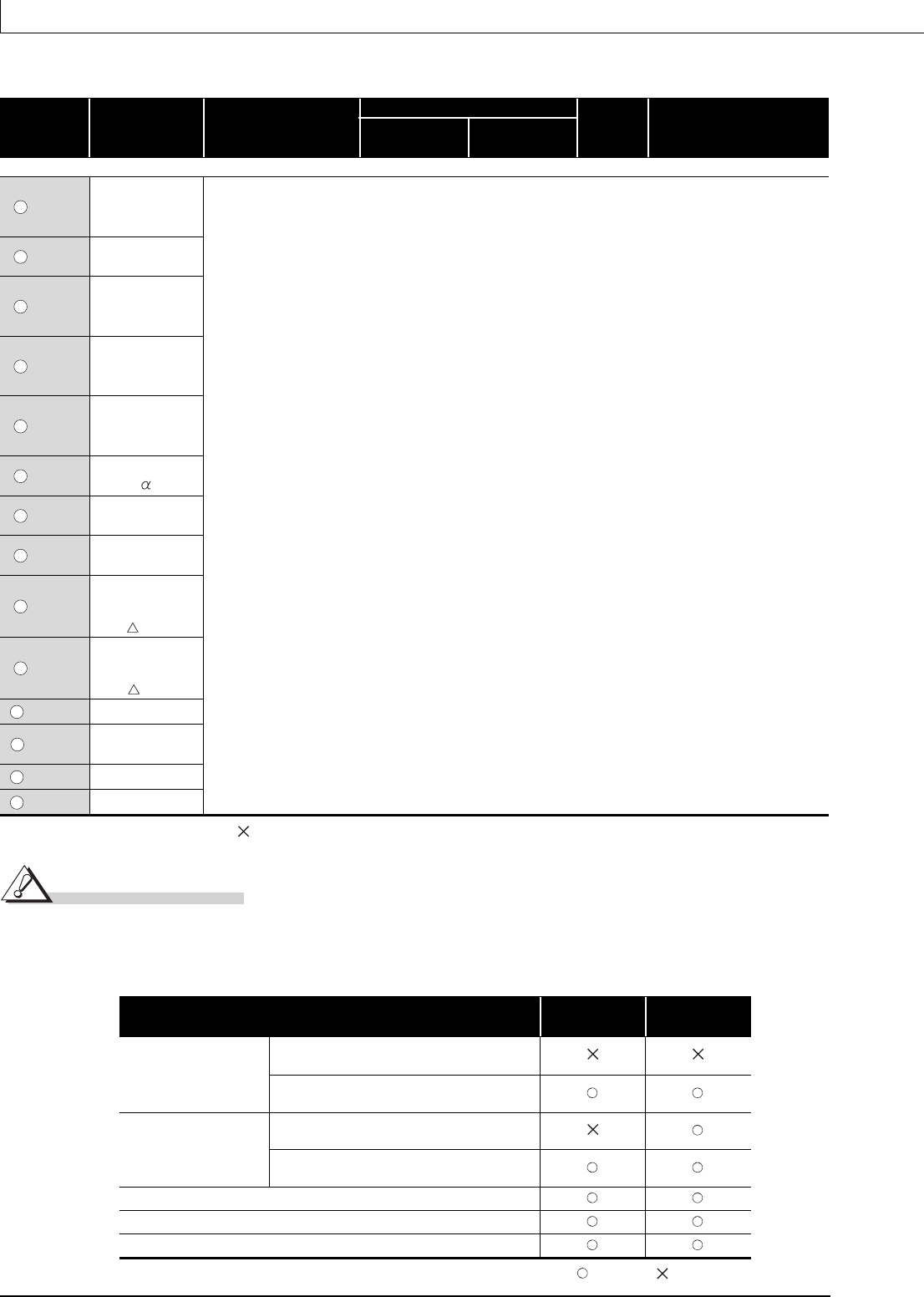
Precautions
The following table shows the CPU modules applicable to the PID control instructions (inexact
differential) and the PID control instructions (exact differential).
: Applicable, : Not applicable
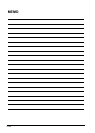
Device Data item Description
Setting range
Setting
side
Processing when the
setting data are outside the
setting range
With PID limits
Without PID
limits
Setting data for No. n loop
+(m+0)
Operational
expression
selection
The same as Setting data for No. 1 loop
+(m+1)
Sampling cycle
(T
S)
+(m+2)
Proportional
constant
(K
P)
+(m+3)
Integral
constant
(T
I)
+(m+4)
Derivative
constant
(T
D)
+(m+5)
Filter coefficient
( )
+(m+6)
MV lower limit
(MVLL)
+(m+7)
MV upper limit
(MVHL)
+(m+8)
MV change rate
limit
( MVL)
+(m+9)
PV change rate
limit
( PVL)
+(m+10)
(Fixed value)
+(m+11)
Derivative gain
(K
D)
+(m+12)
(Fixed value)
+(m+13)
(Fixed value)
CPU module model
Inexact
differential
Exact
differential
Basic model QCPU
The first five digits of the serial number are
'04121' or lower.
The first five digits of the serial number are
'04122' or higher
High Performance model
QCPU
The first five digits of the serial number are
'05031' or lower.
The first five digits of the serial number are
'05032' or higher.
Redundant CPU
Universal model QCPU
LCPU
s
s
s
s
s
s
s
s
s
s
s
s
s
s