



















6.1 PID Control Instruction (Inexact Differential)
6.1.3 PIDSTOP instruction and PIDRUN instruction
6-11
6
PID CONTROL
INSTRUCTION
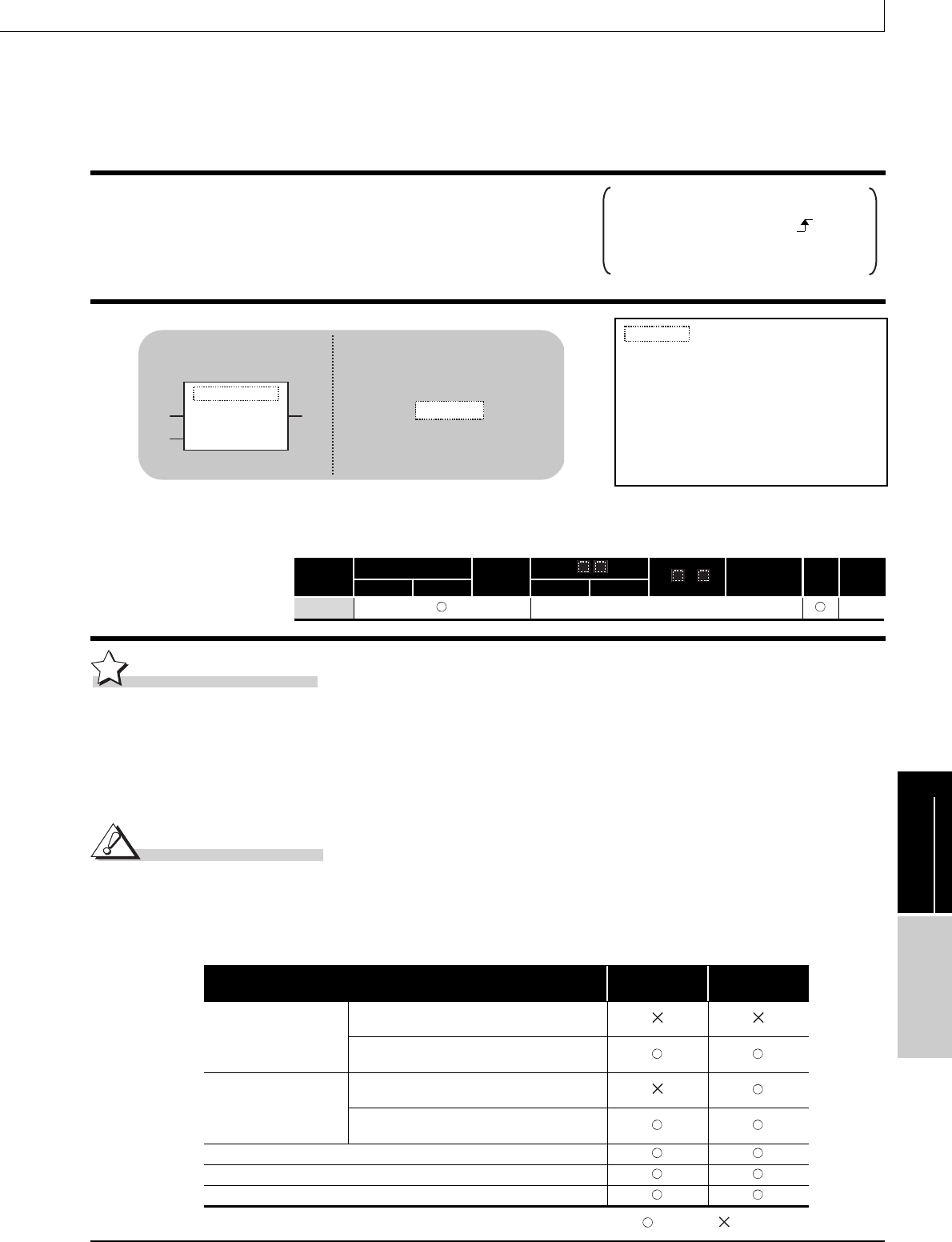
S_PIDSTOP,
S_PIDRUN
S_PIDSTOP, S_PIDRUN
6.1.3 PIDSTOP instruction and PIDRUN instruction
S_PIDSTOP, S_PIDRUN
Function
(1) S(P)_PIDSTOP
This instruction stops the PID operation for the loop number specified by 'n'.
(2) S(P)_PIDRUN
This instruction starts the PID operation for the loop number specified by 'n'.
Precautions
The following table shows the CPU modules applicable to the PID control instructions (inexact
differential) and the PID control instructions (exact differential).
: Applicable, : Not applicable
S(P)_PIDSTOP
S(P)_PIDRUN
P: Executing condition
:
indicates any of the following
instructions.
S_PIDSTOP S_PIDRUN
SP_PIDSTOP SP_PIDRUN
Input argument EN:
Executing condition :Bit
n:
Loop number for stop/start :ANY16
Output argument ENO:
Execution result :Bit
Setting
data
Internal device
R, ZR
J\
U\G
Zn
Constant
K, H
Others
Bit Word Bit Word
n
CPU module model
Inexact
differential
Exact
differential
Basic model QCPU
The first five digits of the serial number are
'04121' or lower.
The first five digits of the serial number are
'04122' or higher
High Performance model
QCPU
The first five digits of the serial number are
'05031' or lower.
The first five digits of the serial number are
'05032' or higher.
Redundant CPU
Universal model QCPU
LCPU
Structured ladder/FBD
ST
EN ENO
n
S_PIDSTOP
S_PIDSTOP
(EN, n);ENO:=