


















8-4
8.1 Positioning Function Dedicated Instruction
8.1.2 IPDSTRT instruction
IPDSTRT1, IPDSTRT2
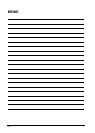
Control Data
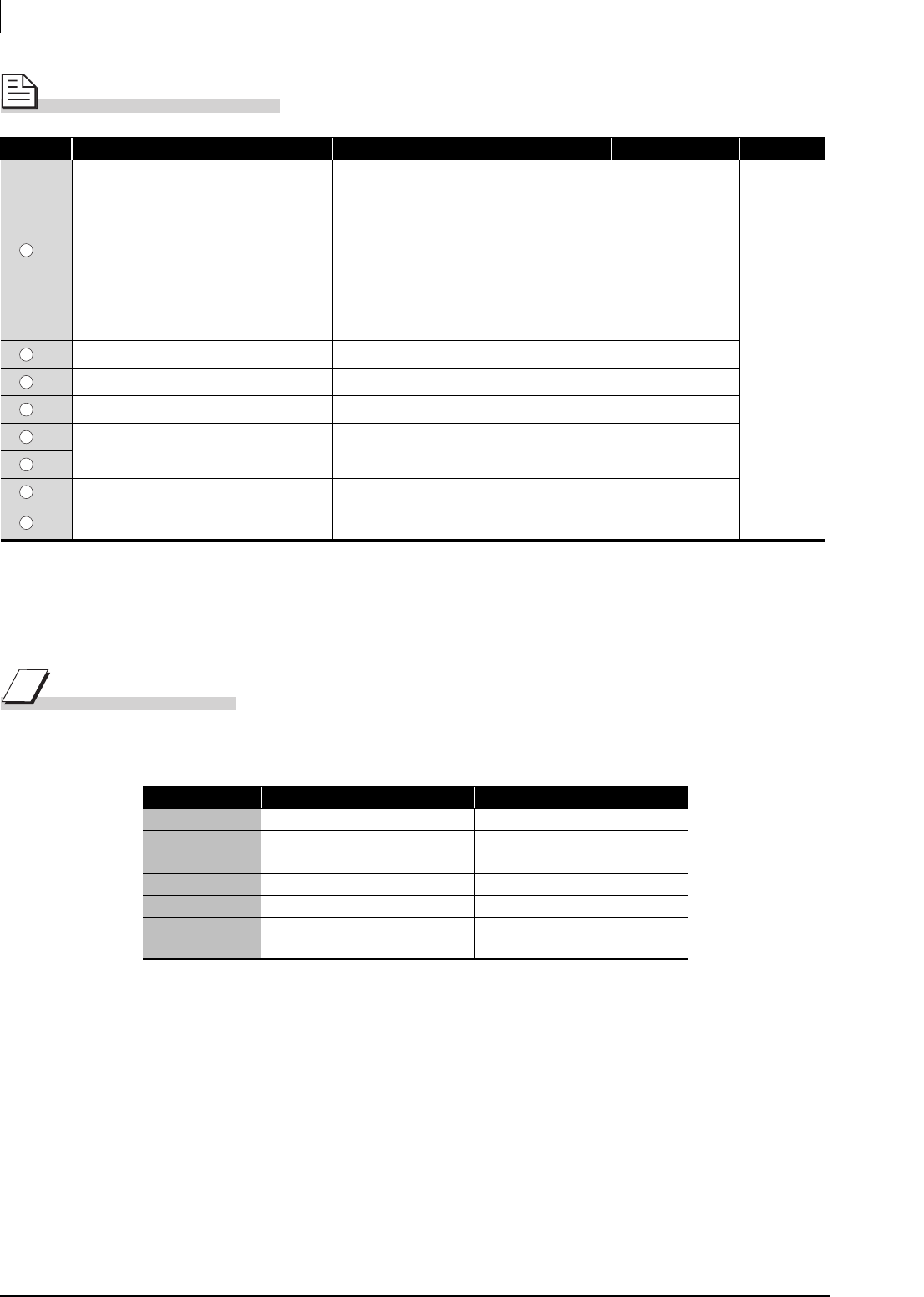
Program Example
The following program sets the following positioning data and starts the axis 1 when M0 turns
ON.
Device Item Setting data Setting range Setting side
[0]
Control system
1: Positioning control (ABS)
2: Positioning control (INC)
3: Speed/position switching control
(forward RUN)
4: Speed/position switching control
(reverse RUN)
5: Current value change
6: Speed control (forward RUN)
7: Speed control (reverse RUN)
1 to 7
User
[1]
Acceleration/deceleration time
0 to 32767 (ms)
[2]
Deceleration stop time
0 to 32767 (ms)
[3]
Dwell time
0 to 65535 (ms)
*1
[4]
Command speed
0 to 200000
(pulse/s)
*2
[5]
[6]
Positioning address/movement amount
-2147483648 to
2147483647
(pulse)
[7]
*1: Enter the setting value to the program as described below.
1 to 32767: Enter in decimal
32768 to 65535: Enter after converting it to hexadecimal
*2: The restricted speed value may be applied when the set value of the command speed is not within 0 to
200000.
Device Item Setting data
D0 Control system Positioning control (ABS)
D1 Acceleration/deceleration time 1000 (ms)
D2 Deceleration stop time 1000 (ms)
D3 Dwell time 0 (ms)
D4, D5 Command speed 20000 (pulse/s)
D6, D7
Positioning address/movement
amount
100000 (pulse)
s
s
s
s
s
s
s
s