



















8-10
8.1 Positioning Function Dedicated Instruction
8.1.5 IPJOG instruction
IPJOG1, IPJOG2
Control Data
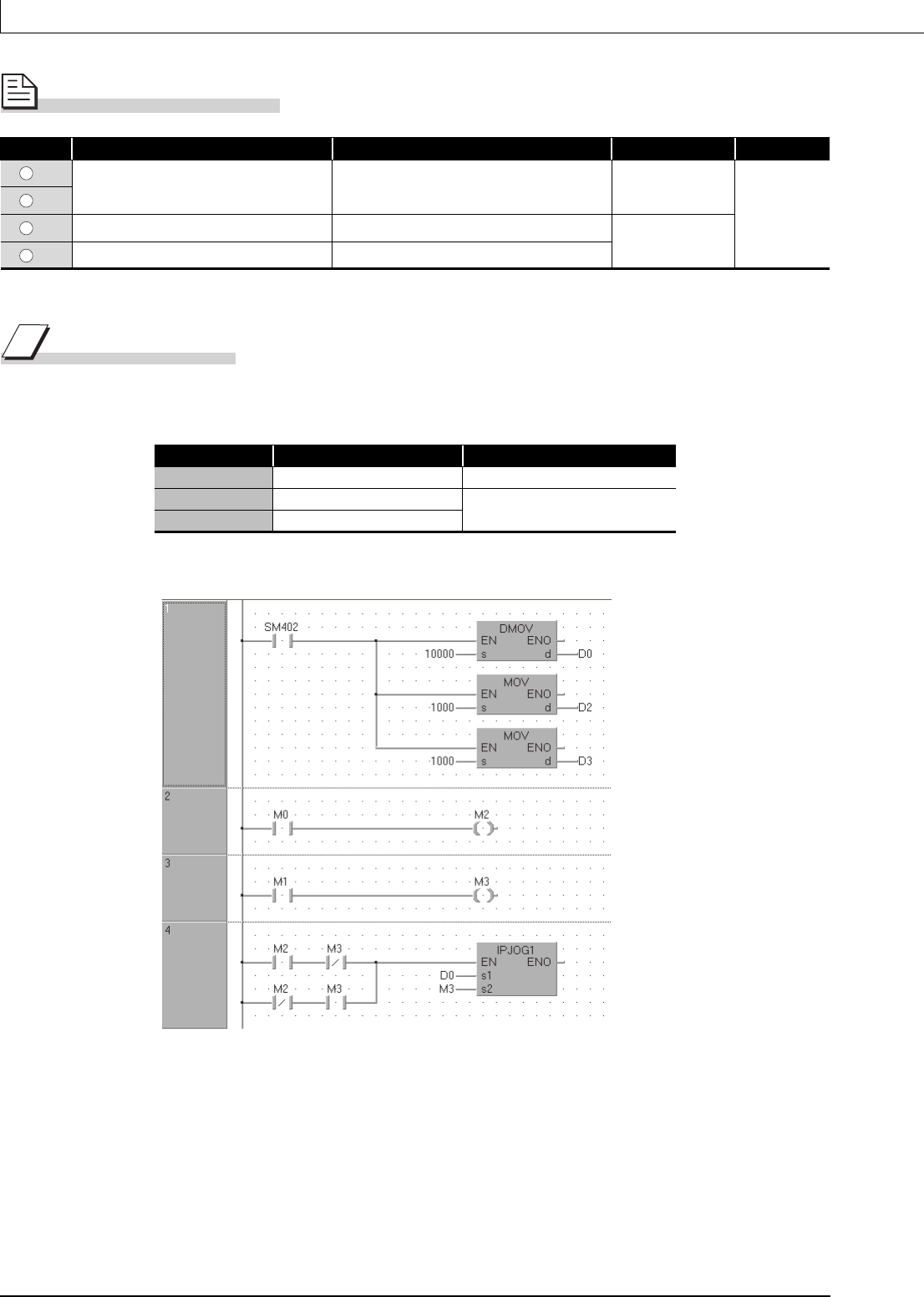
Program Example
The following program starts the forward JOG operation when M0 turns ON, and starts the
reverse JOG operation when M1 turns ON.
[Structured ladder/FBD]
[ST]
DMOV(SM402, 10000, D0);
MOV(SM402, 1000, D2);
MOV(SM402, 1000, D3);
OUT(M0, M2);
OUT(M1, M3);
IPJOG1(M2 AND NOT M3 OR NOT M2 AND M3, D0, M3);
Device Item Setting data Setting range Setting side
[0]
JOG speed
0 to 200000
(pulse/s)
*1
User
[1]
[2]
JOG acceleration time
0 to 32767 (ms)
[3]
JOG deceleration time
*1: The restricted speed value may be applied when the set value of the JOG speed is not within 0 to 200000.
Device Item Setting data
D0, D1 JOG speed 10000 (pulse/s)
D2 JOG acceleration time
1000 (ms)
D3 JOG deceleration time
s1
s1
s1
s1