



















6-22
6.2 PID Control Instruction (Exact Differential)
6.2.2 PIDCONT instruction
PIDCONT
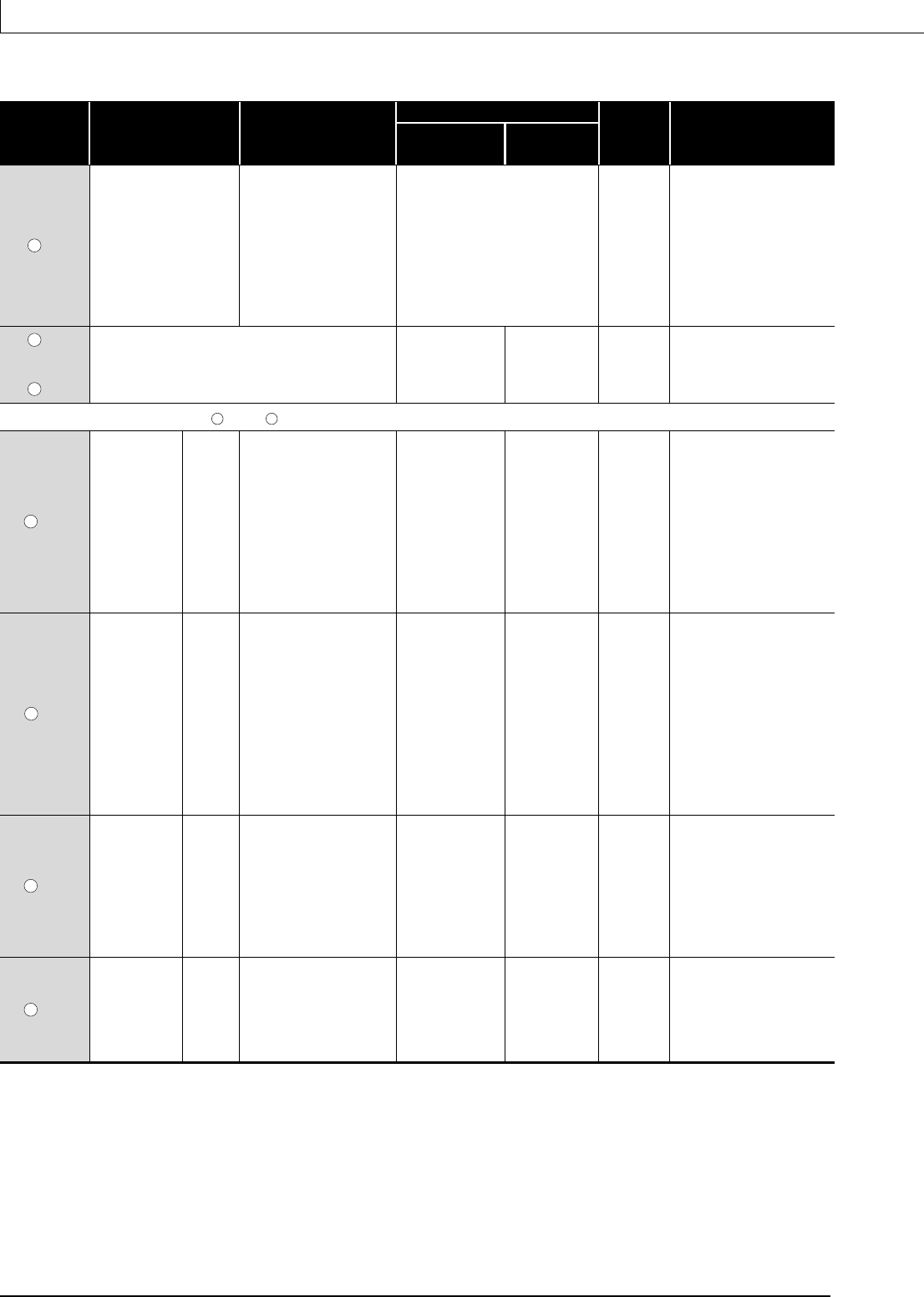
(1) I/O data
*1 : For process value after filtering (PVf), the value calculated based on the process value of input data are
stored.
For the operational expression, refer to MELSEC-Q/L/QnA Programming Manual (PID Control Instructions).
Device Data name Description
Setting range
Setting
side
Processing when the
setting data are outside
the setting range
With PID limits
Without PID
limits
+0
Initial processing flag
Processing method at
the start of PID operation
0 : PID operation for the
number of loops to be used
is batch-processed in one
scan.
Other than 0: PID operation for
the number of loops to be
used is processed in several
scans.
User
–
+1
PID control work area
(reserved by the system)
––– –
to
+9
I/O data area for No. 1 loop (device: +10 to +27)
+10
Set value SV
• PID control target
value
0 to 2000
-32768 to
32767
User
In the case of "With PID
limits", the PID operation
is performed after values
are replaced as follows:
• If SV is less than 0, the
value is clipped to 0.
• If SV is greater than
2000, the value is
clipped to 2000.
+11
Process
value
PV
• Feedback data from
the control target to
the A/D conversion
module
-50 to 2050
-32768 to
32767
User
In the case of "With PID
limits", the PID operation
is performed after values
are replaced as follows:
• If PV is less than -50,
the value is clipped to
-50.
• If PV is greater than
2050, the value is
clipped to 2050.
+12
Automatic
manipulated
value
MV
• Manipulated value
obtained by PID
operation
• The value is output
from the D/A
conversion module to
the control target.
-50 to 2050
-32768 to
32767
System
–
+13
Process
value after
filtering
PVf
• Process value
obtained by
calculation using
operational
expression.
*1
-50 to 2050
-32768 to
32767
System
–
s
s
s
s
s
s
s
s
s