



















9 PID CONTROL FUNCTION
9.6 Details of Parameters
61
9
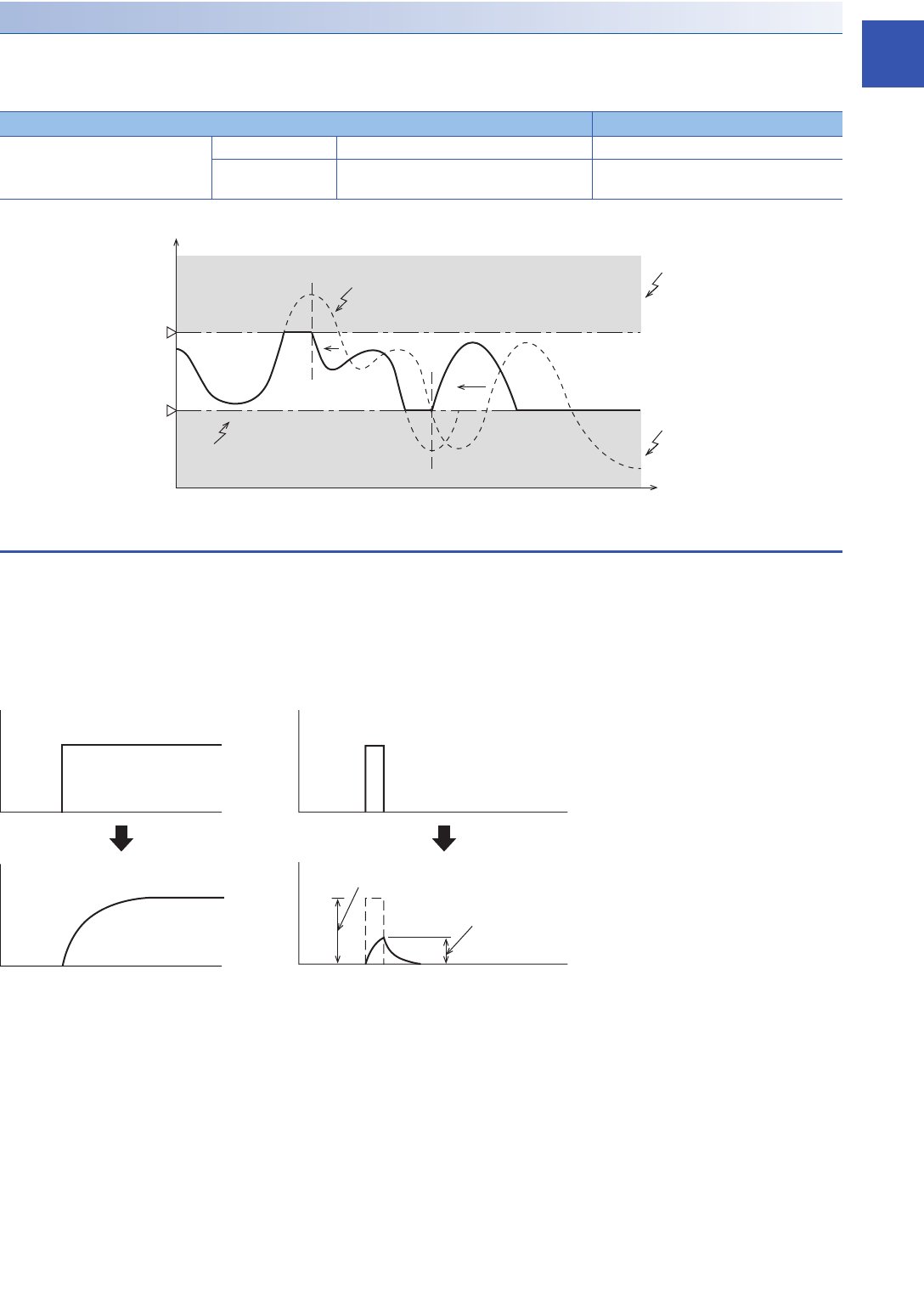
Upper and lower limits for output value
When the upper and lower limit settings of the output value are valid, the output value is as shown in the chart. The upper limit
and lower limit of the output value can moderate the increase of the integral item in the PID control.
When using the upper limit and lower limit of the output value, make sure to set (s3)+1, b2 to OFF.
Input filter constant (s3)+2
The input filter () is a software filter to reduce the fluctuation of the measured value (PV) caused by noise. By setting this time
constant of the filter according to the control target characteristics and noise level, the effect of noise can be reduced. If the
input filter value is too small, the filter effect is small. If the input filter value is too large, the input response is bad. Setting
range: 0 to 99 (%).
Because the input filter () acts on the target value (SV), all of the proportional operation, integral operation and differential
operation are affected.
Set item Setting description/Setting range
Operation setting (s3)+1: b2 Output variation alarm Make sure to set it to OFF
(s3)+1: b5 Output value upper/lower limit setting ON: Used
OFF: Not used
Output value upper limit
Output value lower limit
Time
(s3)+22
Output value (MV)
(s3)+23
These values are not output
These values are not output
When the upper limit and
lower limit of output value are set
When the upper limit and
lower limit of output value are not set
Measured value (PV) processed
by input filter
Input amplitude
Pulse input by noiseActual measured value (PV)
Time
Time
Time
Time
Input amplitude processed
by input filter