



















64
9 PID CONTROL FUNCTION
9.6 Details of Parameters
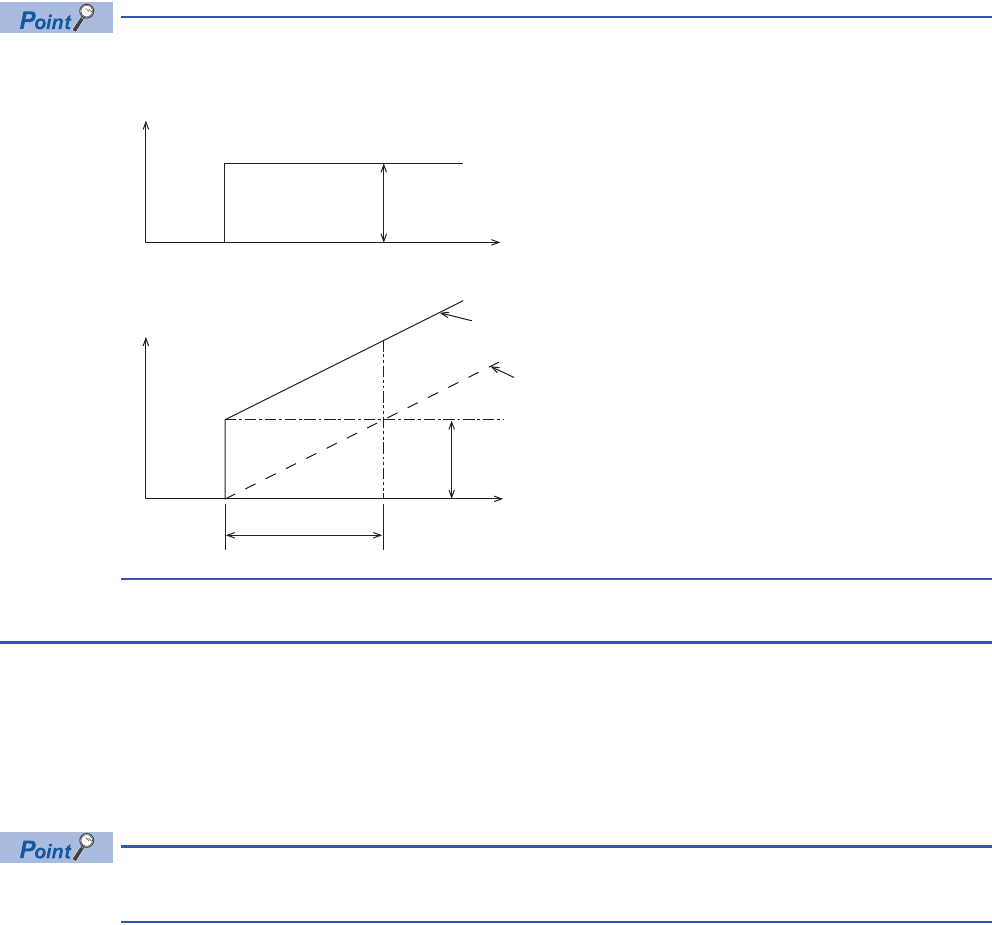
The integral operation changes the output so that the continuously generated deviation is eliminated. As a
result, the remaining deviation generated in the proportional operation can be eliminated.
Differential gain (s3)+5
The filter is applied to the output at the differential operation. Setting range: 0 to 100 (%)
Only the differential operation is affected by the differential gain (KD).
• When the differential gain (KD) is small, the output is immediately given with regard to changes in the measured value (PV)
caused by disturbance, etc.
• When the differential gain (KD) is large, the output is given after a long time with respect to changes in the measured value
(PV) caused by disturbance, etc.
Set the differential gain (KD) to "0", and then adjust the operation using the input filter ().
If the output response is too close to the disturbance, increase the differential gain (KD).
Deviation
Output (MV)
Deviation (EV)
Time
Time
Output of "proportional operation + integral operation"
Output of integral operation
Output of proportional operation
Proportional gain (KP) × Deviation (E)
Integral time (TI)