



















9 PID CONTROL FUNCTION
9.8 Examples of Program
79
9
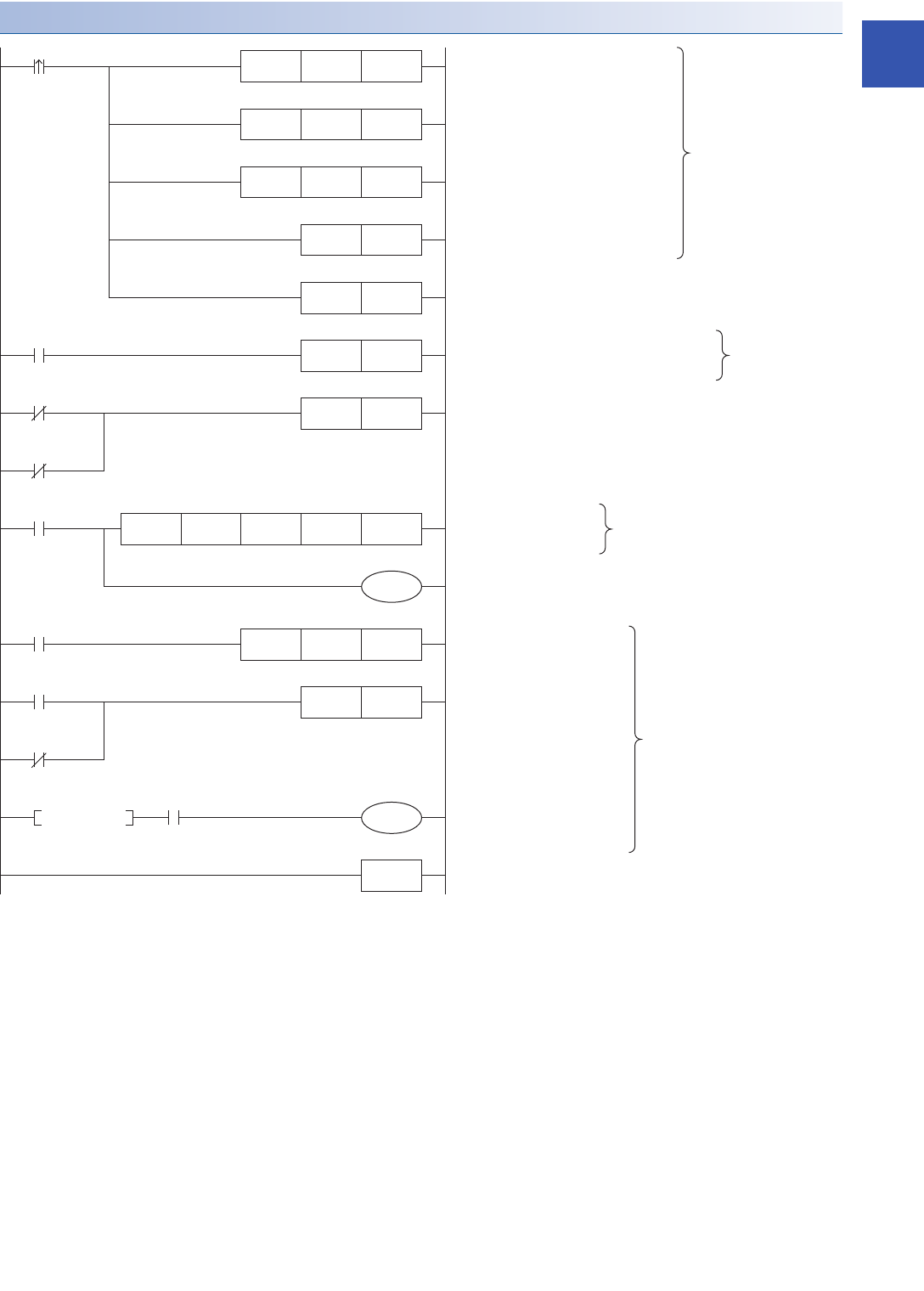
Program
OUTHS ST0 K2000
MOV
X010
Auto-tuning is started
SM402
Initial pulse
D511.4
Auto-tuning is executed
Auto-tuning is executed
Auto-tuning is executed
Auto-tuning is executed
X010
Auto-tuning is started
M4
ST0
Heater operation
cycle
M4
M4
Auto-tuning is executed
ST0<D502
D511.4
MOV
MOV
SD6022
K5000
K500
K1800
RST
SET
RST
RST
D510PID
< ST0 D502
D500
RST
D500
The target value is set to 50°C
The sampling time is set to
500 ms
The output of auto-tuning
is set to 1.8 sec.
PID instruction
initial setting
Built-in analog monitor
CH1: SD6022
CH2: SD6062
0: Enable
1: Disable
Heater output control
The auto-tuning mode is set to
step response method
Auto-tuning is started
The built-in analog is set to used CH
CH1: SM6021
CH2: SM6061
The PID output is initialized
PID instruction drive
Auto-tuning is executed
The heater operation
cycle is set to 2 sec.
Preset
Heater output
D510
D536
D511.6
D511.4
SM6021
D502
D502
M4
ST0
Y1
END