



















9 PID CONTROL FUNCTION
9.8 Examples of Program
75
9
Program
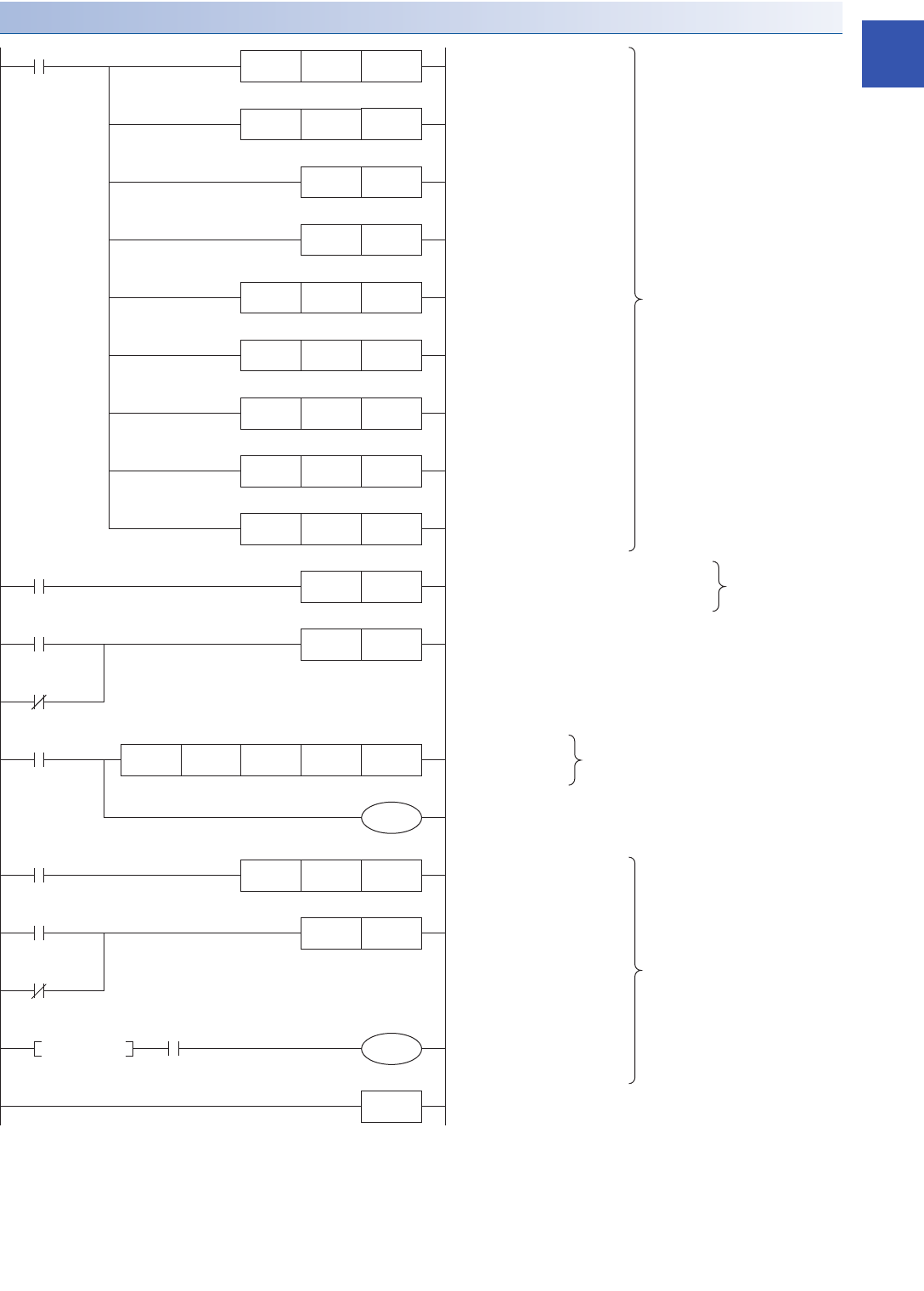
OUTHS ST0 K2000
MOV
SM402
Initial pulse
SM402
Initial pulse
SM402
Initial pulse
X011
PID control
is started
M3
PID operation
is executed
ST0
Heater operation
cycle
M3
PID operation
is executed
M3
PID operation
is executed
ST0<D502
X011
PID control
is started
MOV
MOV
MOV
MOV
MOV
MOV
SD6022
K5000
K500
SET
SET
K2000
K0
K3000
K2000
K5000
RST
RST
D510PID
< ST0 D502
D500
RST
D500
The target value is
set to 50°C
The sampling time is
set to 500 ms
The operation direction
is set to backward
operation
The upper and lower
limits of output value
is set to valid
The output value upper
limit is set to ON for 2 sec.
PID instruction initial setting
Built-in analog monitor
CH1: SD6022
CH2: SD6062
0: Enable
1: Disable
Heater output control
The output value lower
limit is set to ON for 0 sec.
The proportional gain is
set to 3000 %
The integral time is set to
2000×100ms
The differential time is
set to 5000×100ms
The built-in analog is set to used CH.
CH1: SM6021
CH2: SM6061
The PID output is initialized
PID instruction
drive
PID operation is executed
The heater operation
cycle is set to 2 sec
Preset
Heater output
D510
D511.0
D511.5
D532
D533
D513
D514
D516
SM6021
D502
D502
M3
ST0
Y1
END