9 PID CONTROL FUNCTION
9.7 Auto-Tuning
71
9
Step Response Method
For acquiring satisfactory control results during PID control, it is necessary to obtain the optimal value of each constant
(parameter) suitable for the control target. This paragraph explains the step response method to obtain three constants in the
PID control (proportional gain (KP), integral time (TI) and differential time (TD)).
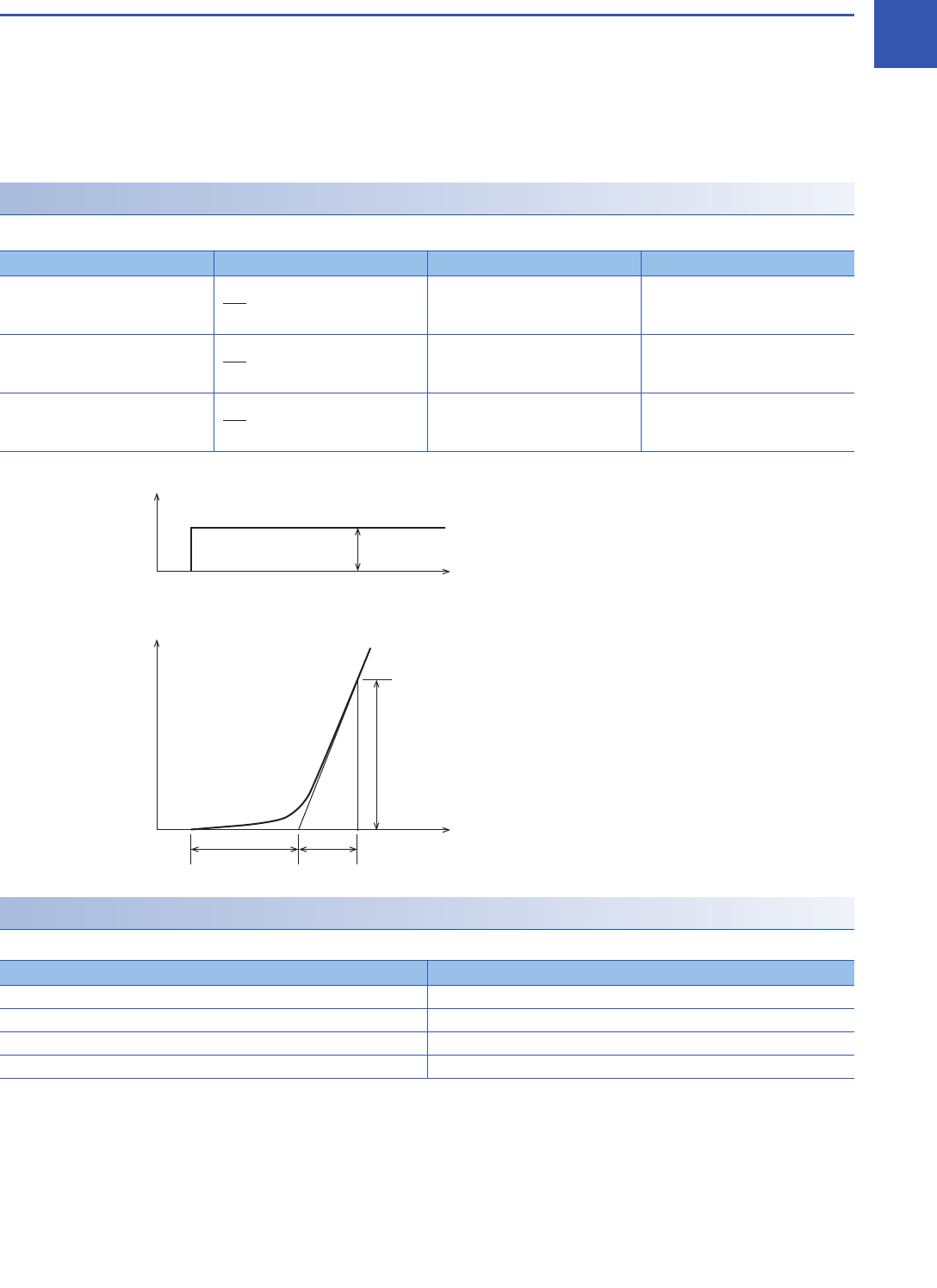
In this method, by giving stepped output from 0 to 100 % to the control system, three constants in the PID control are obtained
from the operation characteristics (maximum ramp (R) and dead time (L)) and the input value variation. The stepped output
may be obtained from 0 to 75% or from 0 to 50 %.
How to obtain three constants in PID control (Reference)
■Operation characteristics and three constants
■Operation characteristics
Parameters set in step response method
The parameters specified in the step response method are shown below.
Control type Proportional gain (KP) [%] Integral time (TI) [ 100 ms] Differential time (TD) [ 10 ms]
Only proportional control (P
operation)
PI control (PI operation) 33L
PID control (PID operation) 20L 50L
Parameter Setting position
Operation setting (ACT) (s3)+3: b0 (operation direction)
Proportional gain (KP) (s3)+3
Integral time (TI) (s3)+4
Differential time (TD) (s3)+6
RL
1
Output value
(MV)
× ×100
RL
0.9
Output value
(MV)
× ×100
RL
1.2
Output value
(MV)
× ×100
0 %
100 %
Output value (MV)
Output value (MV)
Time
Dead time (L) [s]
Time (s)
1 (s)
Maximum ramp (R)
Input value variation



















































































































































































































































































































