68
9 PID CONTROL FUNCTION
9.7 Auto-Tuning
9.7 Auto-Tuning
This chapter describes the auto-tuning function of PID instruction.
The auto-tuning function will automatically set the important constants, such as the proportional gain and the integral time, to
ensure optimum PID control. There are two auto-tuning methods: limit cycle method and step response method.
Limit Cycle Method
For acquiring satisfactory control results in PID control, it is necessary to obtain the optimal value of each constant
(parameter) suitable to the control target. This paragraph explains the limit cycle method to obtain the amplitude (a) and
vibration cycle (, on) of the input value, and then calculate the proportional gain (KP), integral time (TI) and differential time
(TD) based on the expressions shown in the table below.
What is the limit cycle method? Changes in the input value in two-position control (in which the output Upper Limit Value (ULV)
and output Lower Limit Value (LLV) are switched according to the deviation) are measured, and then three constants in the
PID control are obtained.
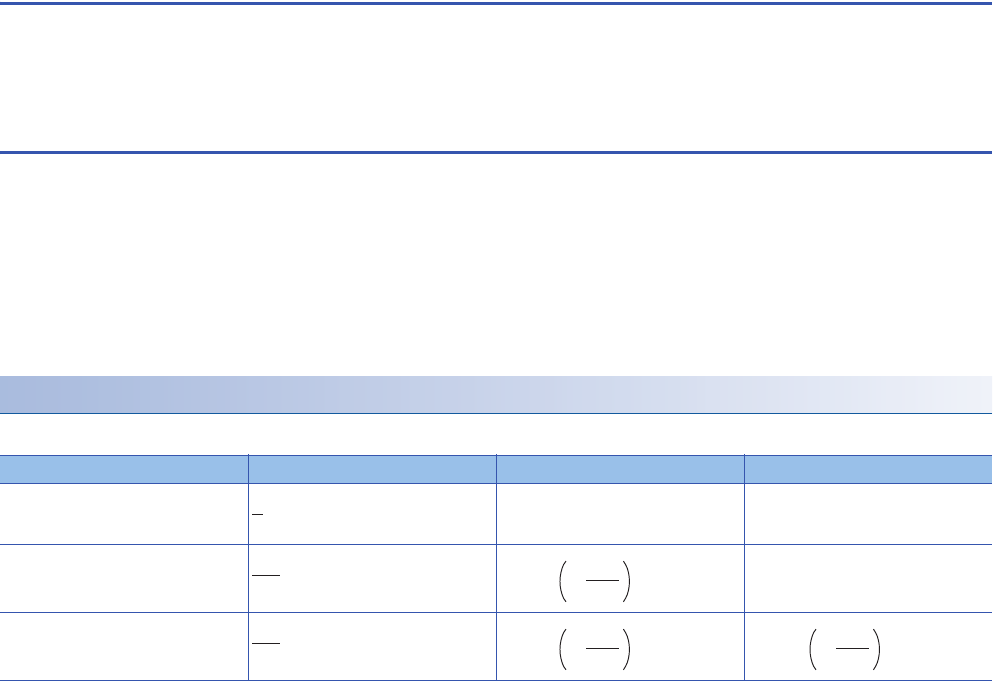
How to obtain three constants in PID control (Reference)
■Operation characteristics and three constants
Control type Proportional gain (KP) [%] Integral time (TI) [ 100 ms] Differential time (TD) [ 10 ms]
Only proportional control (P
operation)
PI control (PI operation)
PID control (PID operation)
a
1
(ULV-LLV)×100
a
0.9
(ULV-LLV)×100
a
1.2
(ULV-LLV)×100
on
1-
50×on



















































































































































































































































































































