



















3 - 41
MDS-D-SVJ3/SPJ3 Series Instruction Manual
3-2 Setting the initial parameters for the servo drive unit
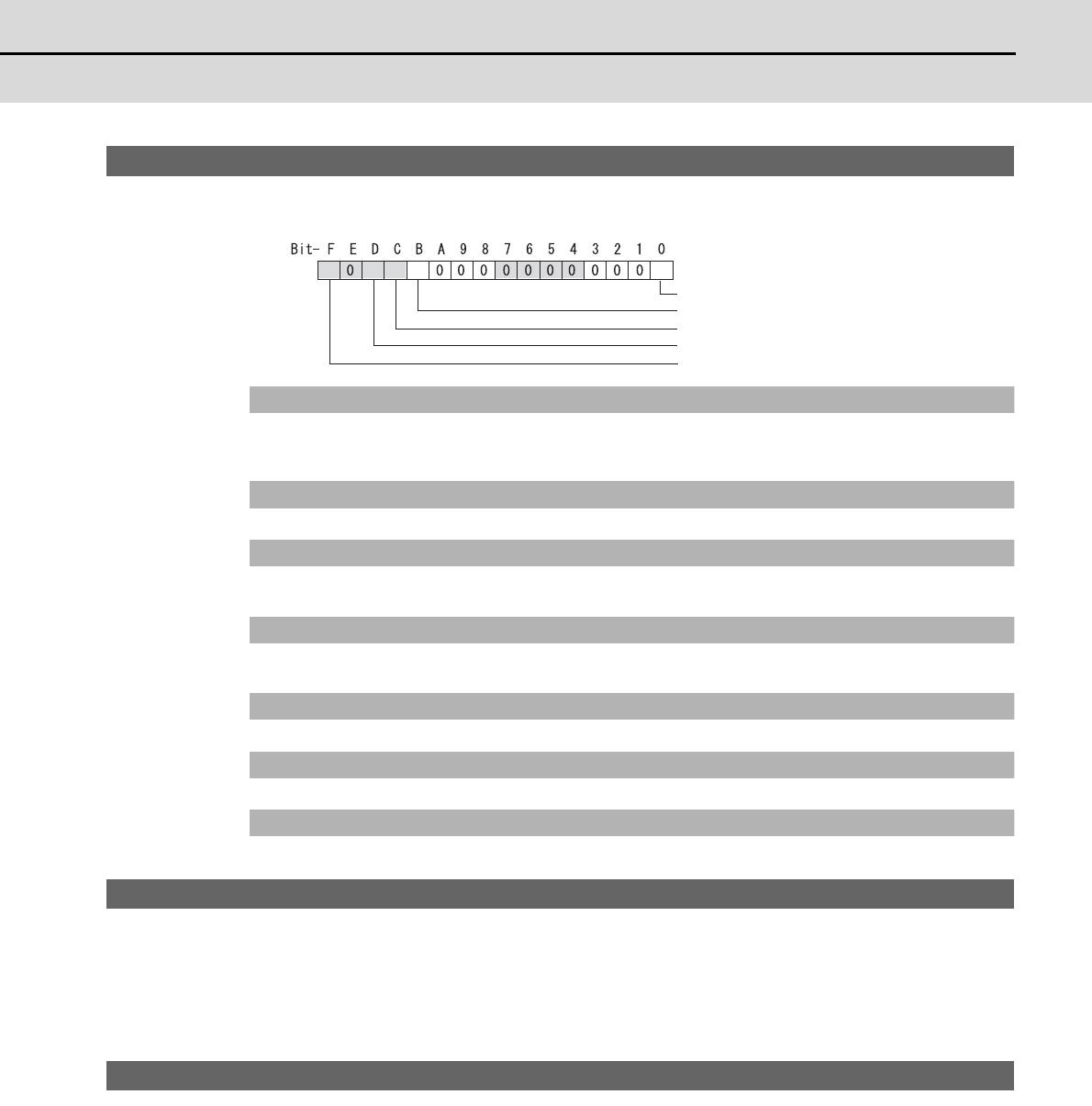
【#2284】 SV084 SSF7 Servo function 7
Select the servo functions.
A function is assigned to each bit.
Set this in hexadecimal format.
bit F : h2c HAS control cancel amount
0: 1/4 (standard) 1: 1/2
Related parameters: SV034/bit1
bit E :
Not used. Set to "0".
bit D : oru Overrun detection width unit (for MDS-D/DH and MDS-DM)
0: mm (normal setting) 1: μm
It is not available for MDS-D-SVJ3 Series.
bit C : odu Excessive error detection width unit (for MDS-D/DH and MDS-DM)
0: mm (normal setting) 1: μm
It is not available for MDS-D-SVJ3 Series.
bit B : ilm2u Current limit value (SV014) in special control setting unit
0: Stall current % (normal setting) 1: Stall current 0.01%
bit A-1 :
Not used. Set to "0".
bit 0 : irms Motor current display
0: Motor q axis current display (normal) 1: Motor effective current display
【#2285】 SV085 LMCk Lost motion compensation 3 spring constant
Set the machine system's spring constant when using lost motion compensation type 3.
When not using, set to "0".
Related parameters: SV016, SV041, SV082/bit2,1, SV086
---Setting range---
0 to 32767 (0.01%/μm)
【#2286】 SV086 LMCc Lost motion compensation 3 viscous coefficient
Set the machine system's viscous coefficient when using lost motion compensation type 3.
When not using, set to "0".
Related parameters: SV016, SV041, SV082/bit2,1, SV086
---Setting range---
0 to 32767 (0.01%/μm)
irms
h2c
ilm2u
odu
oru