



















4 - 40
4 Servo Adjustment
MITSUBISHI CNC
4-5 Adjustment during full closed loop control
4-5-1 Outline
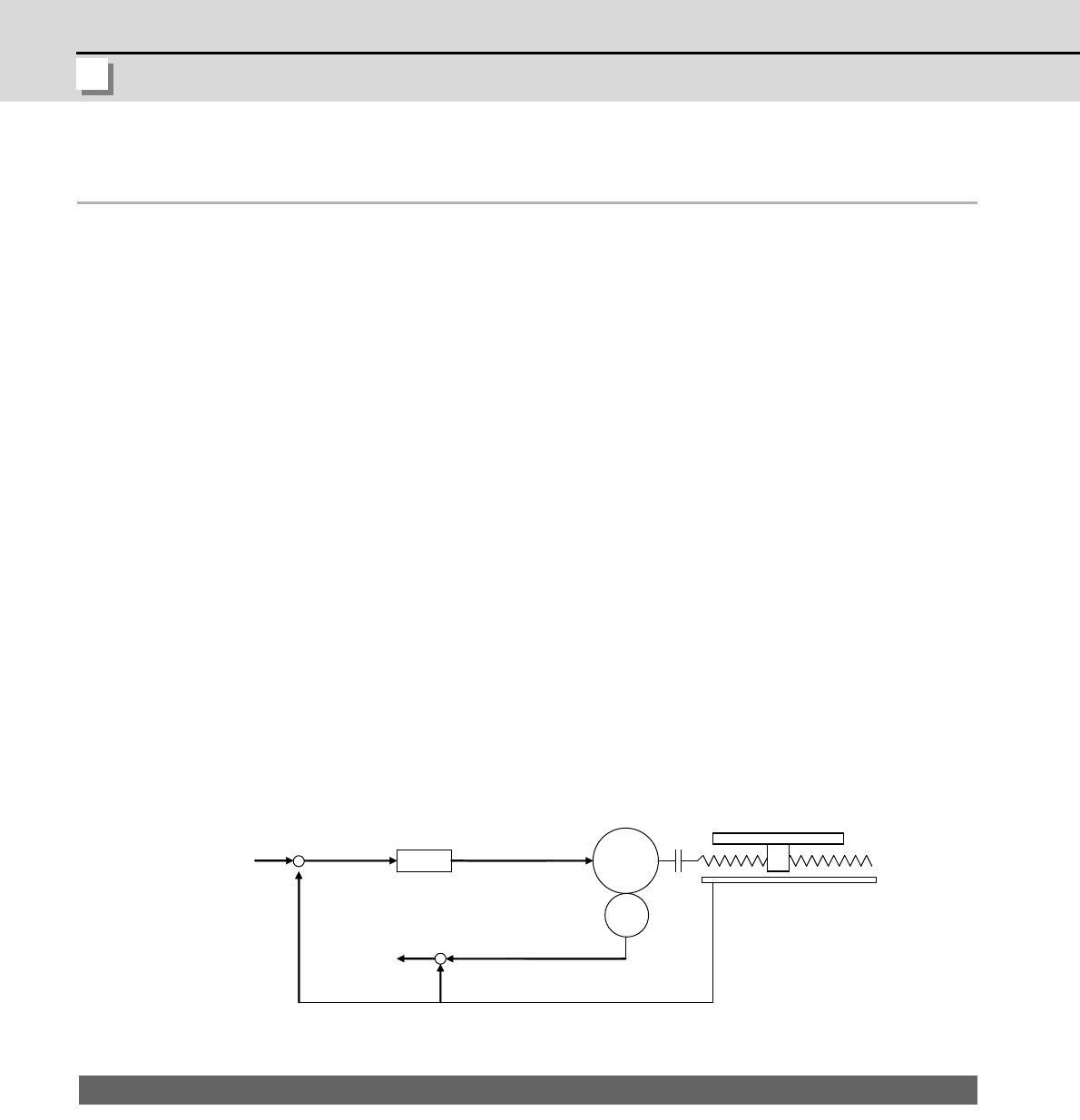
(1) Full closed loop control
The servo control is all closed loop control using the detector's feedback. "Full closed loop control" is the
system that directly detects the machine position using a linear scale, whereas the general "semi-closed
loop" is the one that detects the motor position.
In a machine that drives a table with a ball screw, the following factors exist between the motor and
table end:
[1] Coupling or ball screw table bracket's backlash
[2] Ball screw pitch error
These can adversely affect the accuracy. If the table position is directly detected with a linear scale,
high-accuracy position control which is not affected by backlash or pitch error is possible. However, with
the full closed loop system, the machine system is also directly included in the position loop control.
Thus, if the machine's rigidity is not high, the gain cannot be increased, and the required high accuracy
cannot be attained.
The procedures for adjusting the servo with the full closed loop system are the same as the semi-closed
loop system. Vibration or overshooting will occur easily, so the position loop gain is generally lower than
the semi-closed loop.
(2) Overrun detection
With the full closed system, the position feedback (FB) detected with the linear scale is used for the
position control. However, the motor position FB is detected at the same time, and the error of both FB
is observed. If this FB error exceeds the servo parameter SV054 setting value, alarm 43 will be detected
and the system will stop to prevent overrunning due to a scale FB error from occurring.
【#2254】 SV054 ORE Overrun detection width in closed loop control
Set the overrun detection width in the full-closed loop control.
When the gap between the motor side detector and the linear scale (machine side detector) exceeds
the value set by this parameter, it will be judged as overrun and "Alarm 43" will be detected.
When "-1" is set, the alarm detection will not be performed.
When "0" is set, overrun will be detected with a 2mm width.
For linear servo/DDM system
Not used. Set to "0".
---Setting range---
-1 to 32767 (mm)
Position
command
PGN
+
-
FB error
Position droop
Servo-
motor
ENC
Linear scale
Table
Speed command
Position FB
Position FB
+
-
Overrun detection control