



















4 - 39
MDS-D-SVJ3/SPJ3 Series Instruction Manual
4-4 Characteristics improvement
<Adjustment methods>
[1] Confirm that the motor side circle accuracy measured with the NC sampling function is appropriate.
[2] In this state, measure the machine side low-speed and high-speed circle path without machine end
compensation control. The difference of the high-speed circle path and low-speed circle path is the
amount that path has swelled due to the spring effect of the machine system. Calculate the SV065
setting value with the following expression using this amount as the compensation amount.
[3] Input the value calculated in step [2] into SV065. Measure the high-speed circle path. If the shape is
still elliptical, adjust by increasing/decreasing the SV065 value in 1/10 units.
[4] Confirm that there is no problem with the low-speed circle path.
Example of low-speed and high-speed roundness measurement for adjusting machine compensation
【#2265】 SV065 TLC Machine end compensation gain
The shape of the machine end is compensated by compensating the spring effect from the machine
end to the motor end.
Set the machine end compensation gain. Measure the error amount by roundness measurement
and estimate the setting value by the following formula.
Compensation amount (μm) = Command speed F(mm/min)2 * SV065 / (Radius R(mm) * SV003 *
16,200,000)
Set to "0" when not using.
---Setting range---
-30000 to 30000 (Acceleration ratio 0.1%)
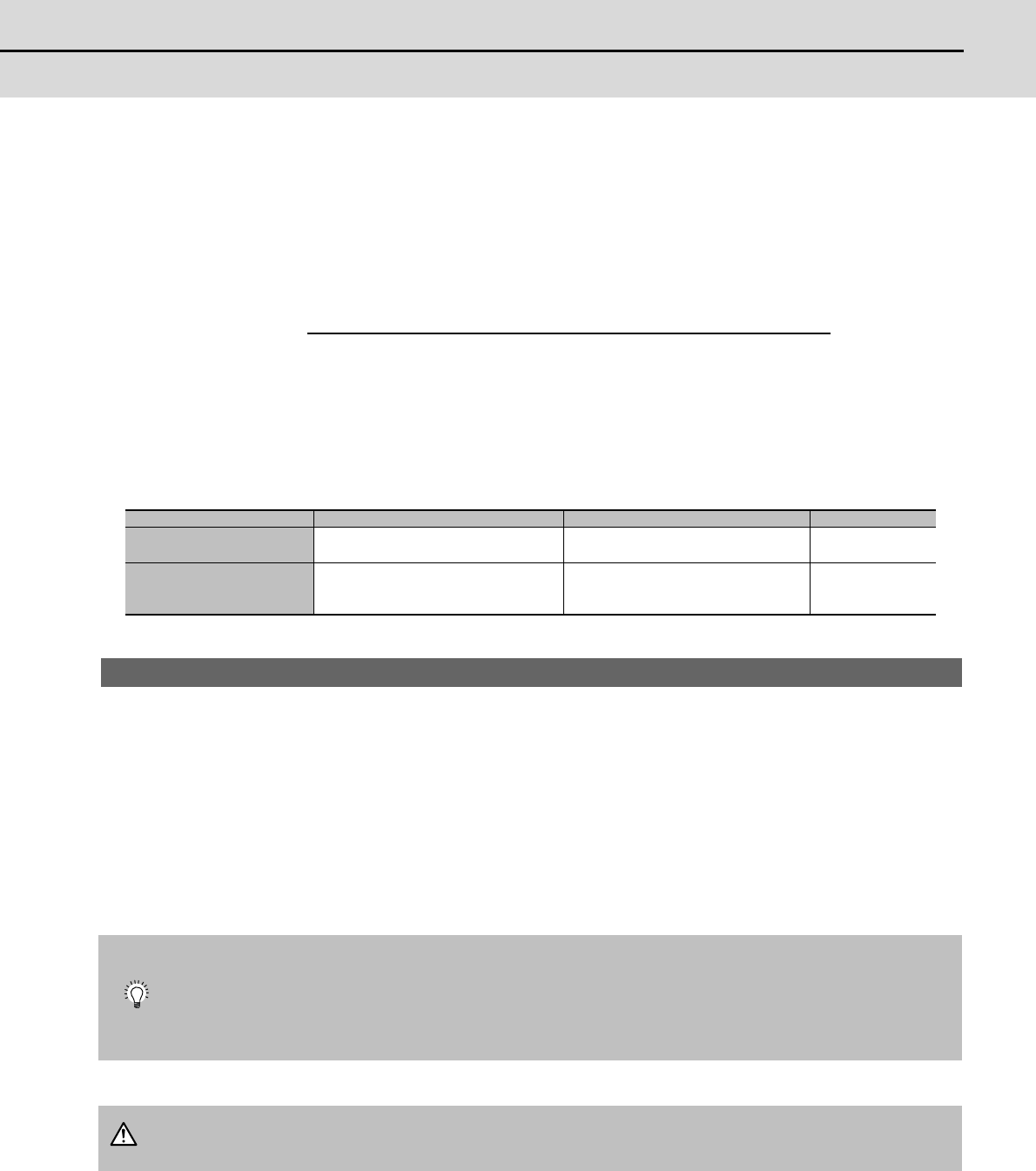
When using grid encoder When using DBB measurement Acceleration
Low speed
(reference circle)
R=25 [mm], F=500 [mm/min] R=100 [mm], F=1000 [mm/min] 0.00028G
High-speed
(when adjusting compen-
sation amount)
R=25 [mm], F=10000 [mm/min] R=100 [mm], F=20000 [mm/min] 0.11G
1. To confirm the machine's spring element, adjust the electrical end roundness, and then machine
roundness while changing the cutting speed. Confirm that the error increases with the speed.
2. The electrical roundness will have an error on the inner side when machine end compensation
control is used.
If an excessive value is set in the machine end compensation gain (SV065), the machine could
vibrate when stopping, resulting in a dangerous state.
SV065 =
Compensation amount [µm] radius R [mm] SV003 x 16,200,000
(command speed F [mm/min])
2
POINT
CAUTION